未来板lite巡线小车
简介
未来板lite获取koi返回的线条坐标,计算出与屏幕下方中点的角度。从而调整车轮速度进行方向调整。从而实现巡线的效果。
准备
- 软件
- 硬件
- koi2
- 未来板lite
- 9g电机
- 一些结构件

小车结构
小车结构部分不是重点,我们在案例中的小车结构也比较简单,这里简单拍一下各个角度的照片,希望能够抛砖迎玉。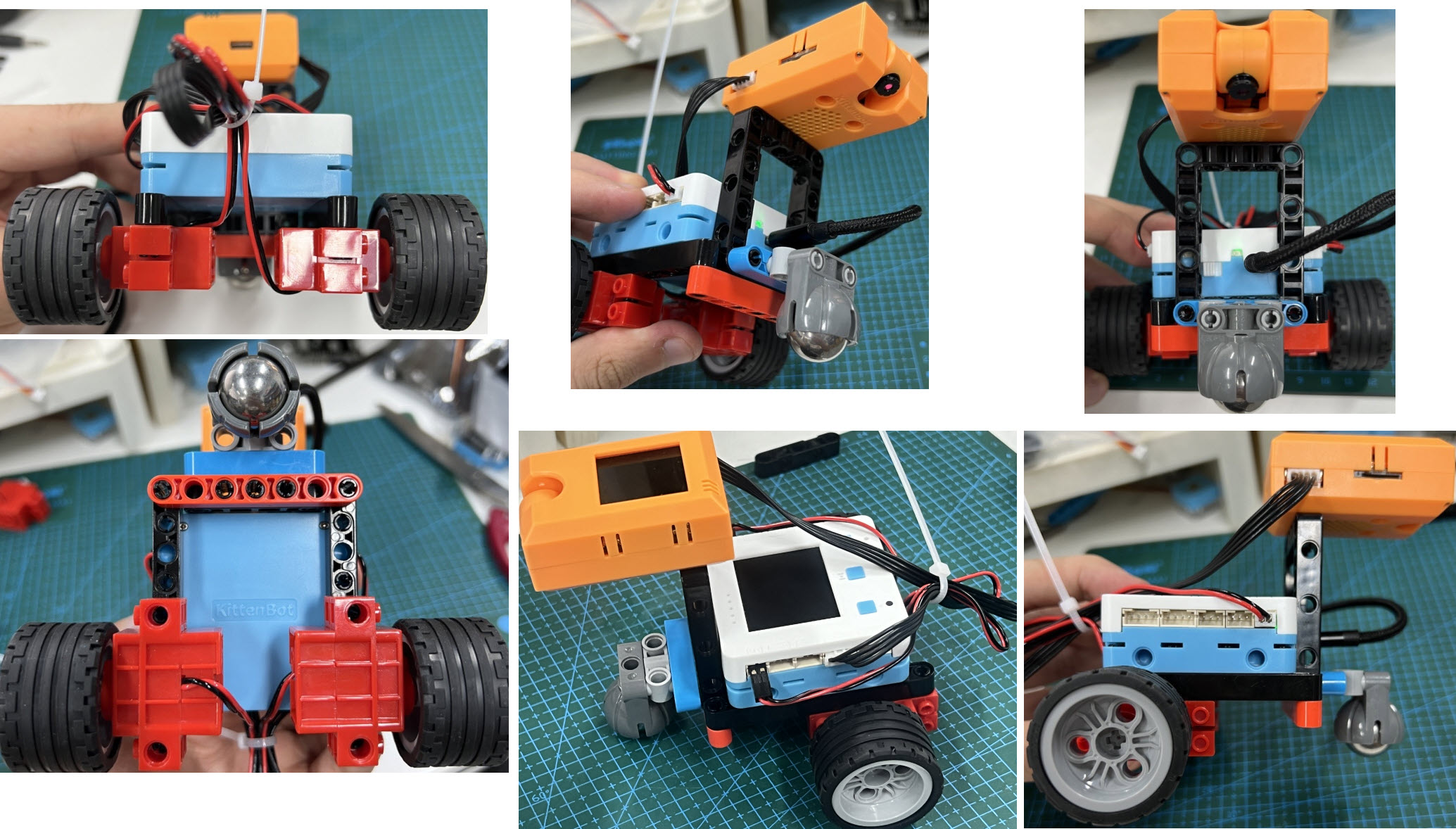
程序逻辑
- 计算线条x1,y1与屏幕下方中点的夹角度数,度数的范围是0~180度。
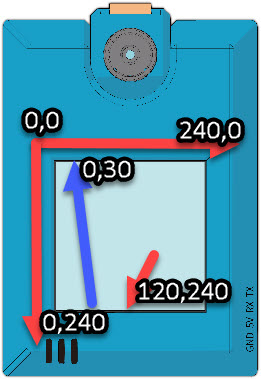
- 计算公式如下
- angle = math.atan((240 - y1) / (120 - x1)) / math.pi * 180
- 如果x1刚好等于120的话,除数为0是无法计算的,所以直接将angle设置为90度即可
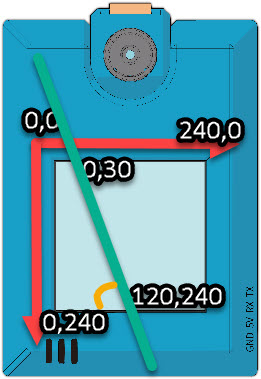
- 当x1角度大于120度时,angle 需要在处理一次
即:angle = 180 - math.fabs(angle)
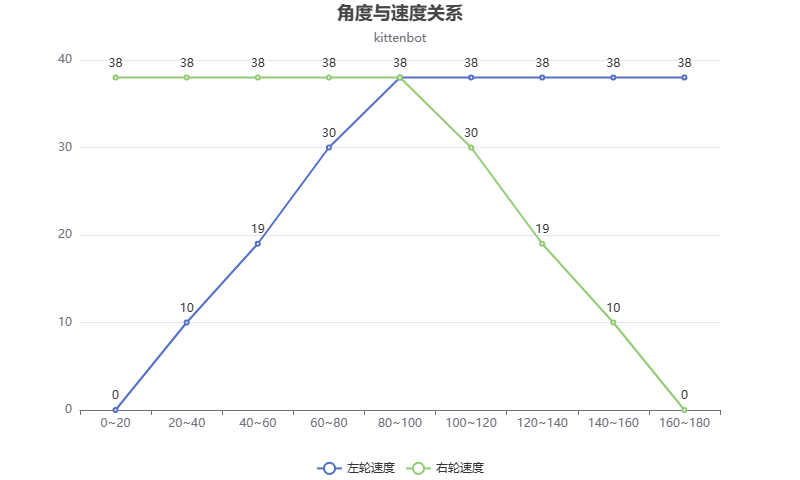
- 根据角度设置两个车轮的速度,角度与车轮的速度关系请参考下图
- 程序源文件
链接:https://pan.baidu.com/s/1ud96RDXh6_zrLdF3w9Nd9g 提取码:izq4