案例说明
无人小车的定义有许多,上到人工智能自动驾驶,下到自动避障车。但本章节希望线带大家了解小车,从小车的控制说起。
效果演示
知识要点
- 了解小车的驱动方式
- 学会数据的区间映射
案例实现
结构搭建
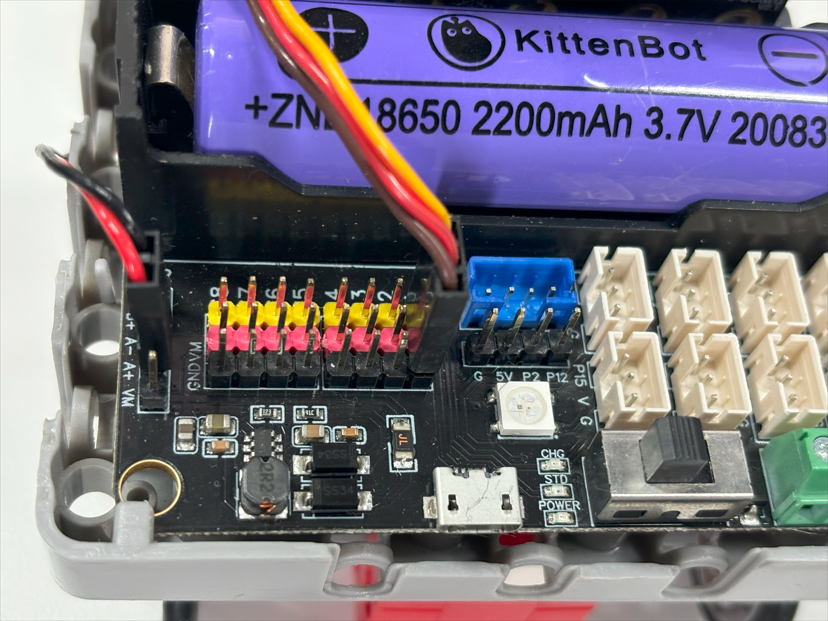
电路连线
制作小车需要使用舵机、电机,外加一个控制用的I2C类型的Sugar摇杆模块,连接方式如下
蓝牙连接
准备工作
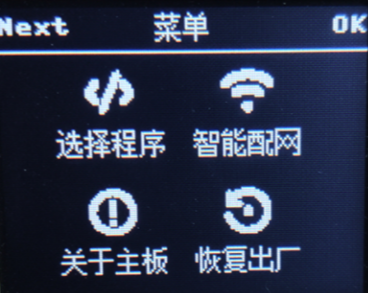
- 未来板开机画面时,按住顶部的按键A即可进入菜单
- 通过按键A移动选项,按键B确定选项

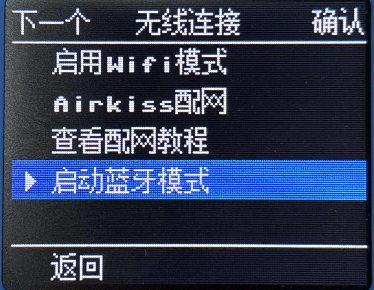
蓝牙连接
适用于最新固件,切在Kittenblock v1.89.xx及以上版本使用
- 启动蓝牙模式后,未来板头顶会有蓝灯跳动,屏幕上显示的是未来板蓝牙名称
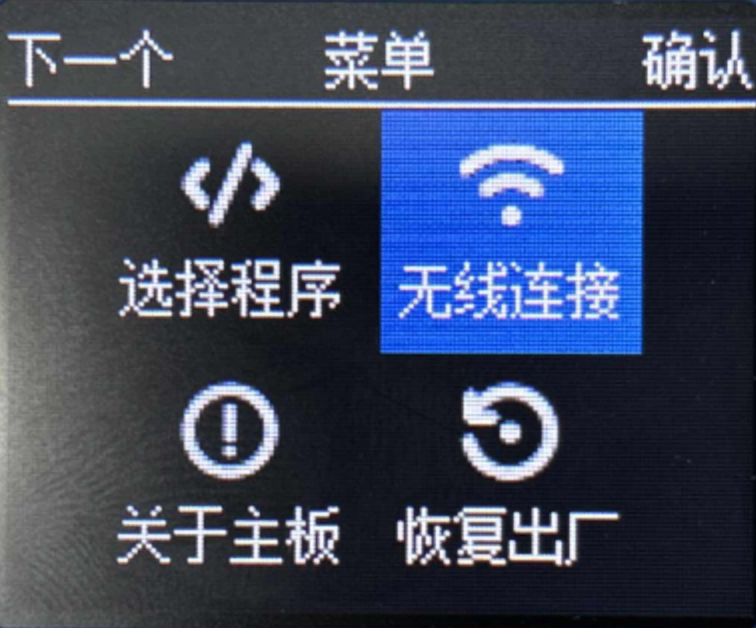
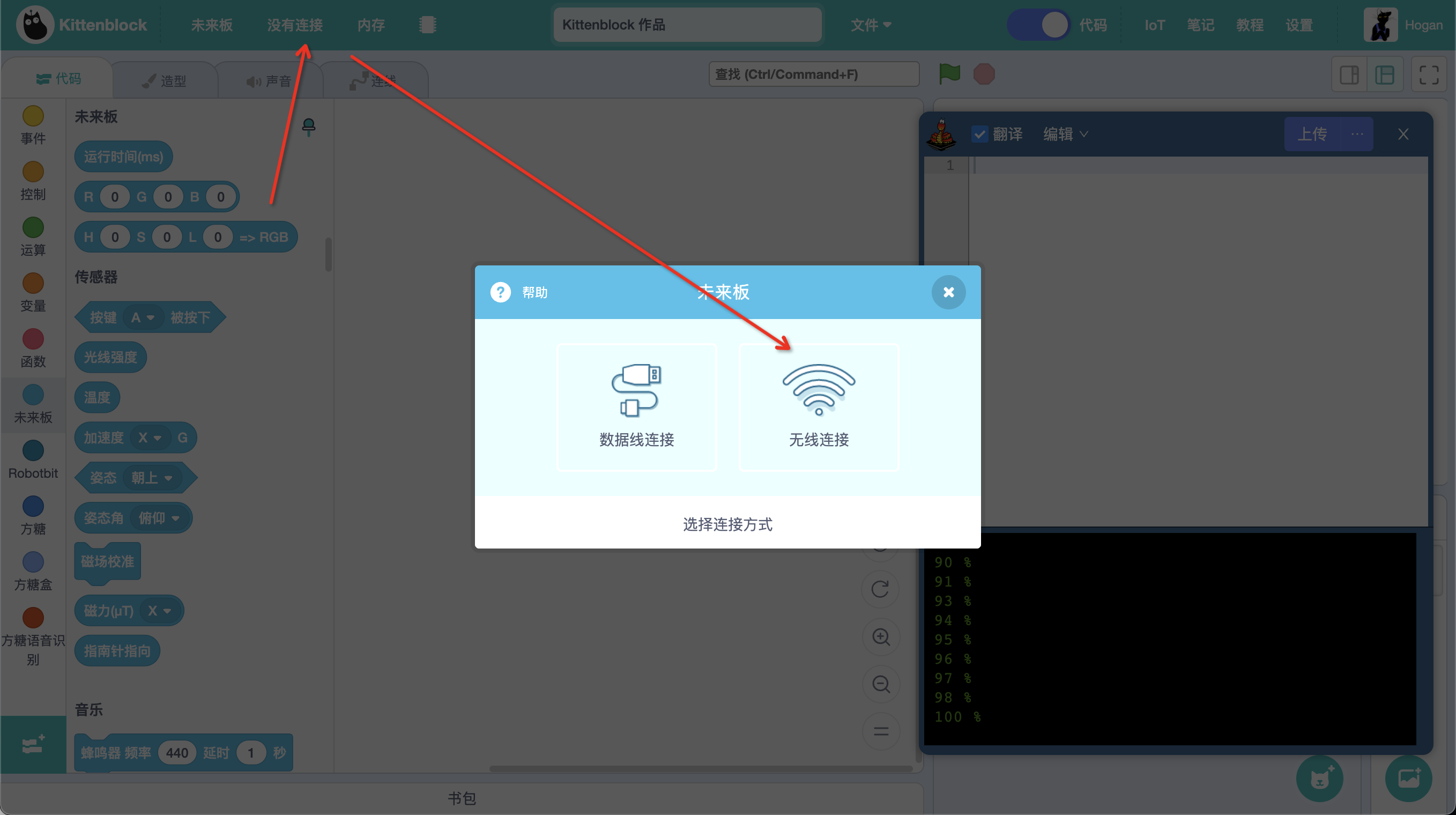
- 在Kittenblock中选择无线连接
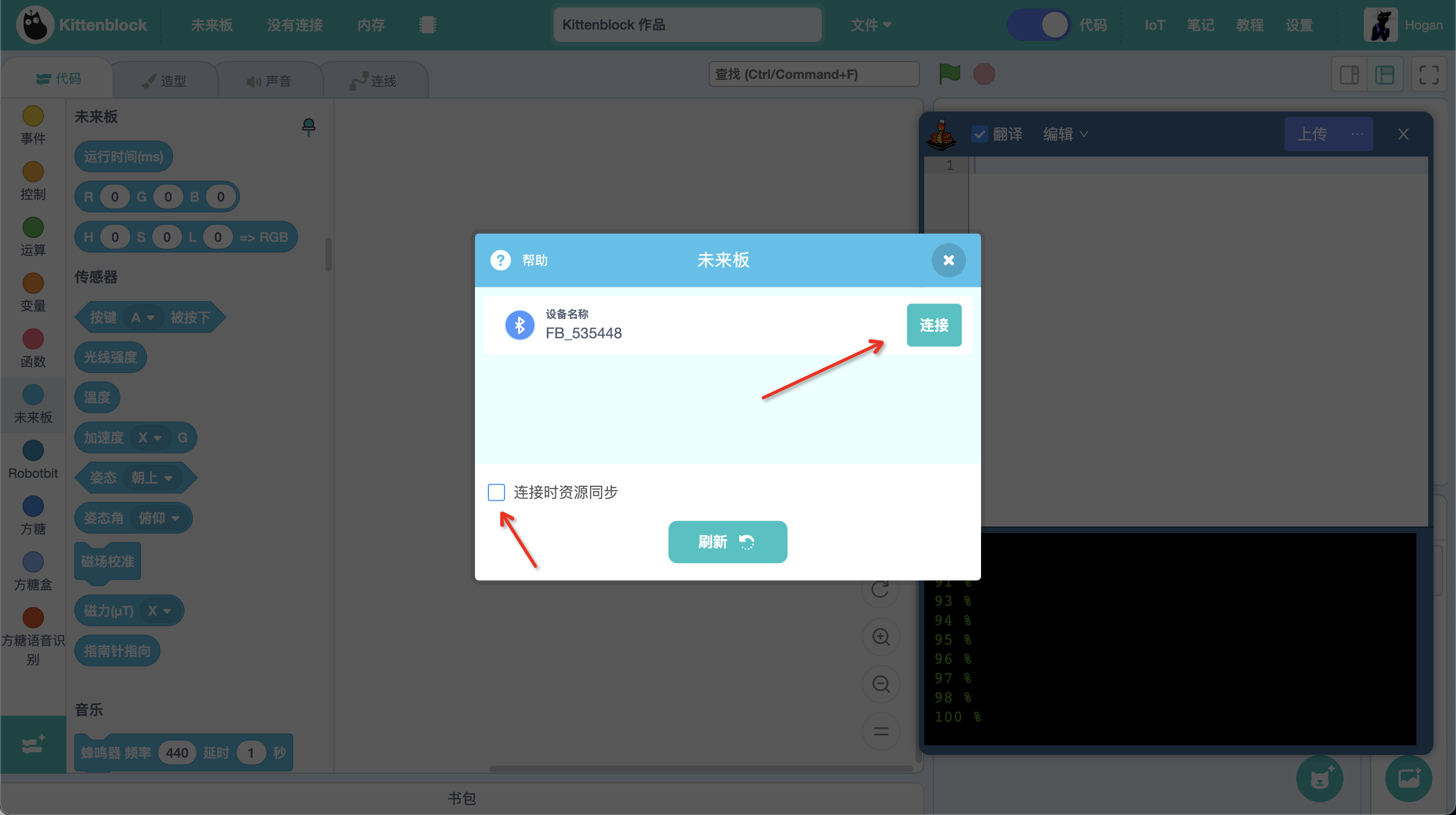
- 找到该名称的蓝牙选择连接
连接前请却把我左下角箭头标注的勾选框处于未勾选状态。
由于蓝牙传输速率远比USB串行传输慢,所以如果进行文件同步,将有大概率卡死
程序编写
基础初始化
用到Robotbit,需要优先初始化。其中舵机角度初始化大概在100度,保证舵机上电时,小车的前轮保持向前
危险
如果上电发现前轮方向扭曲,可尝试调整结构而非程序。

构建遥控程序
这个部分是对车辆前进,后退,转向时的电机和舵机驱动程序
