准备
软件
此处使用Kittenblock 1.89.xx版本
- 下载:https://kittenbot.cn/kittenblock
- 如果你是mac或者win10及以上系统,也可以前往网页版:https://kblock.kittenbot.cn/
硬件
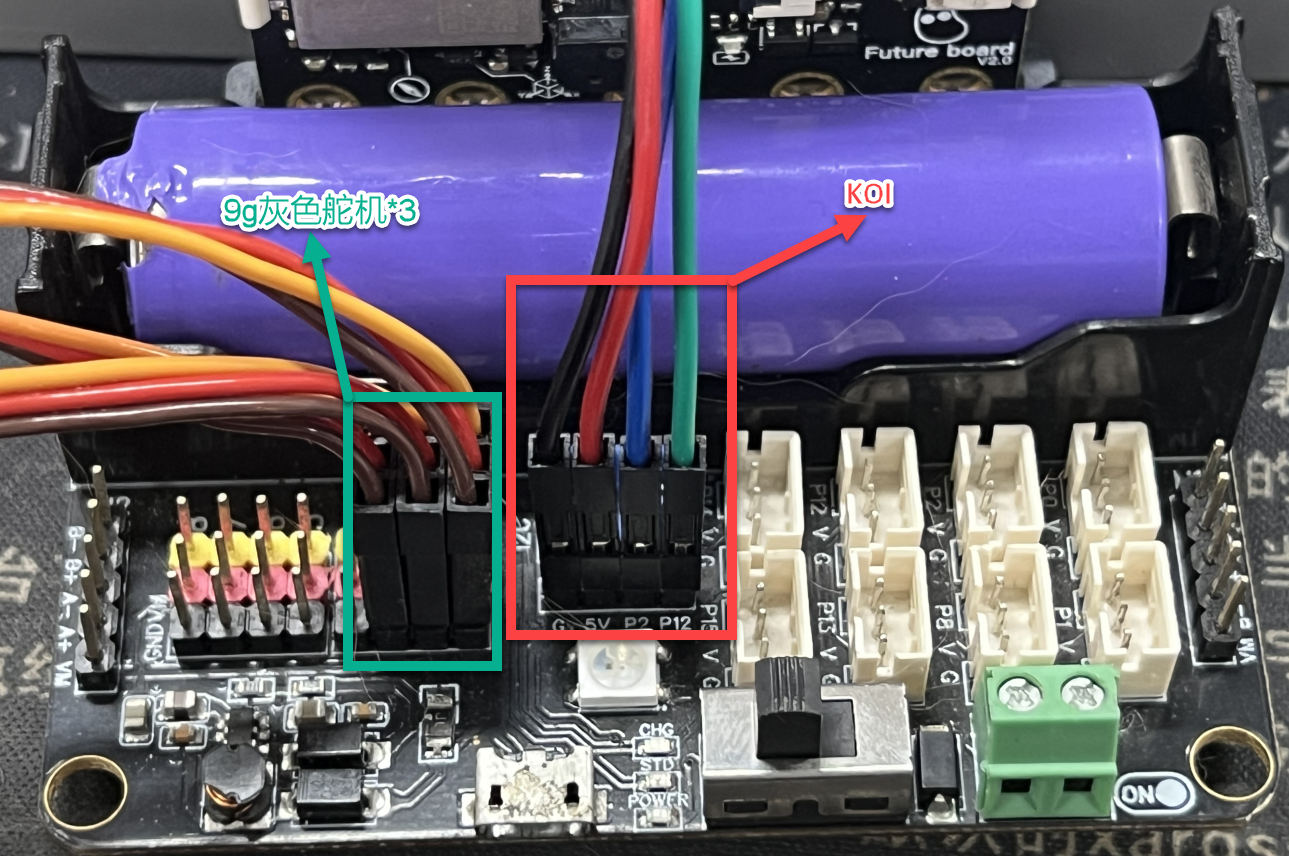
线路连接
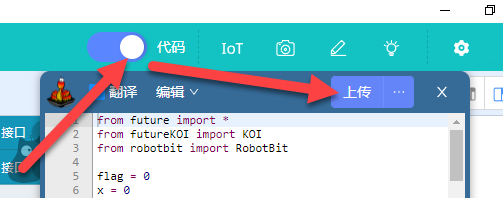
上传程序
- 抢红包程序.zip
- 下载完成之后将作品解压出来

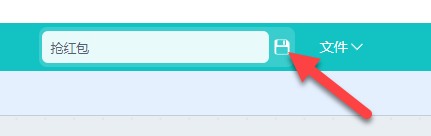
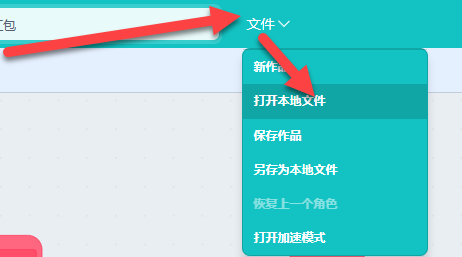
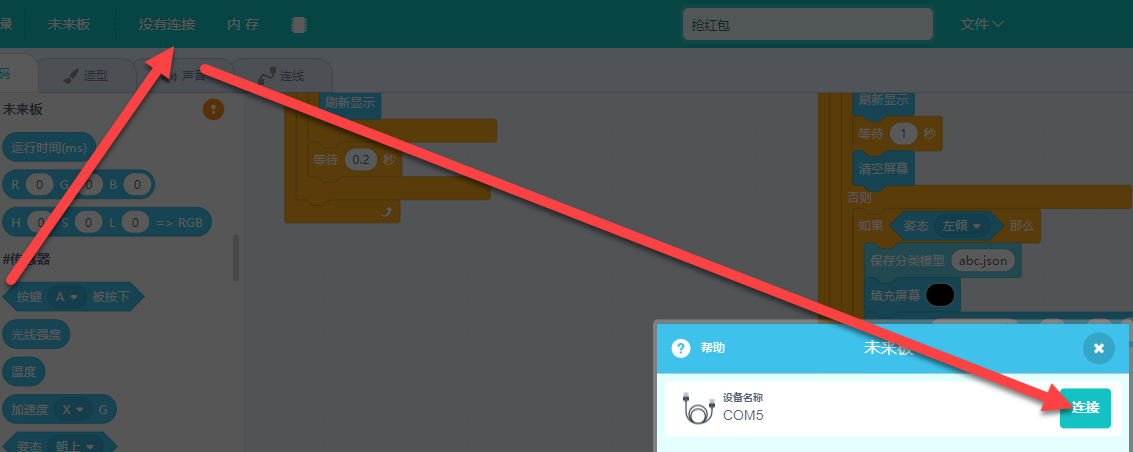
- 打开作品,按照图示点击,然后选择刚才第一步下载的文件
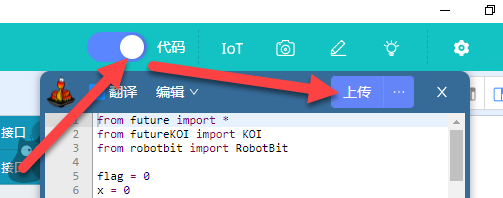
- 之后具体参考🔗未来板快速开始,连接未来版并且上传程序
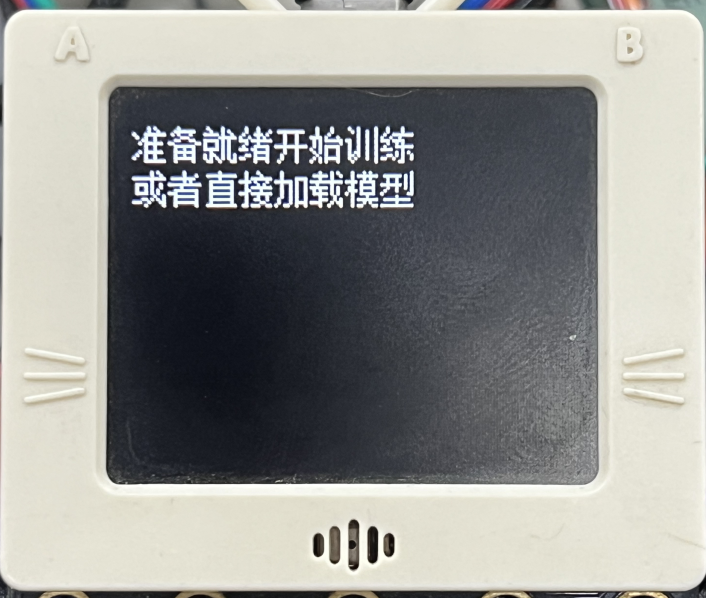
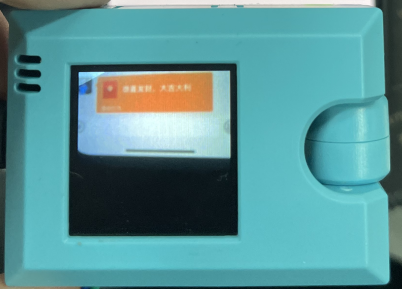
- 未来板屏幕出现以下字样表示程序已经开始运行
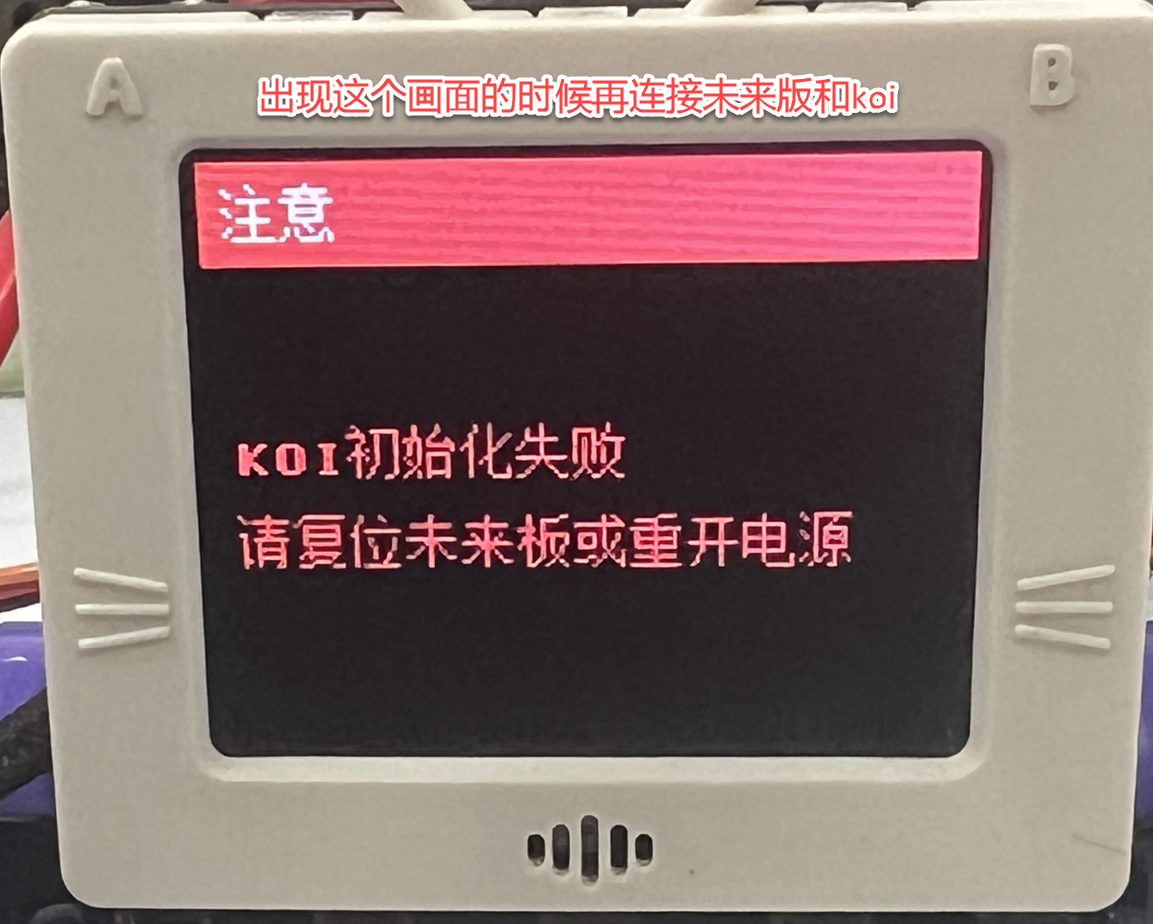
未来版一直无法进入此界面?
- 连接未来板恢复固件,然后再重试一次

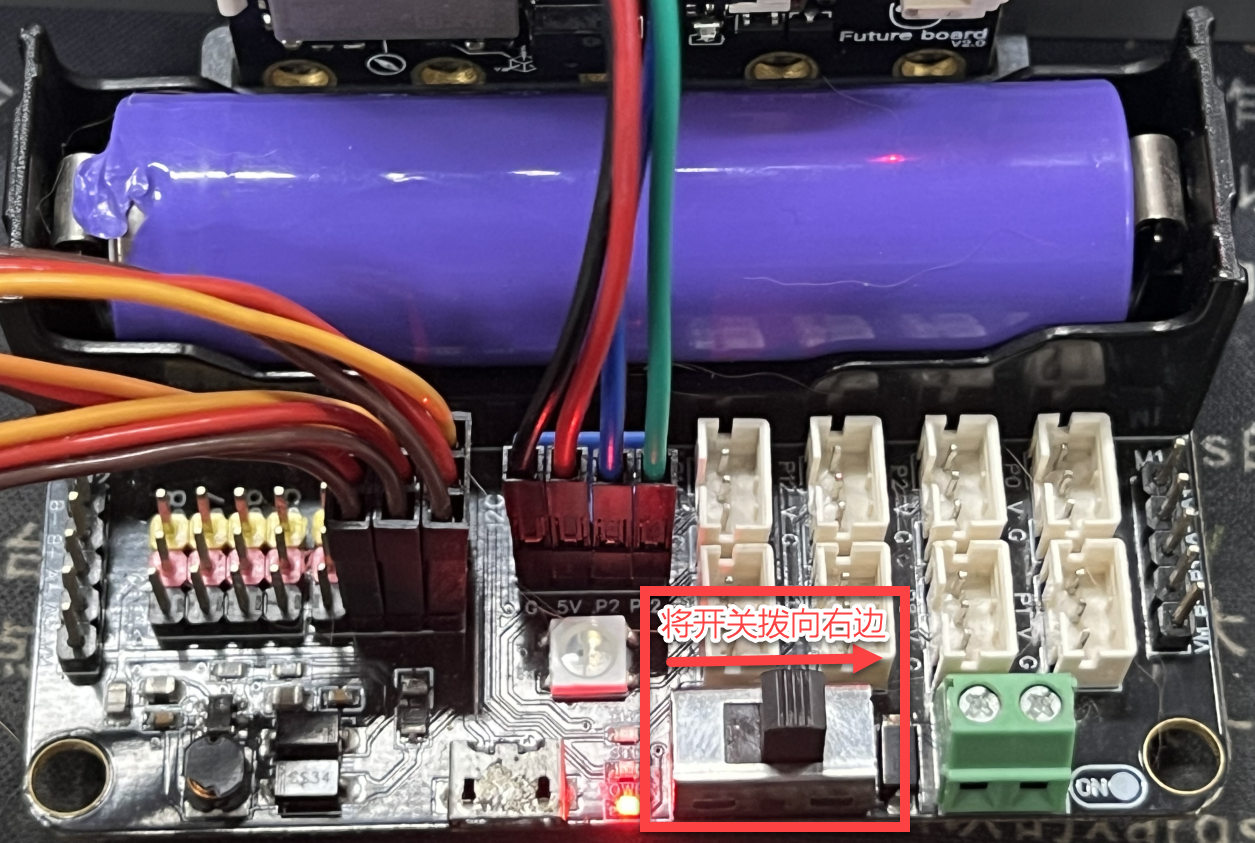
- 首先确保,robotbit电源开关已打开。
- 确保电池电量充足,可以通过robotbit上的usb给电池充电
- 程序下载之后先不要连接koi,等未来板出现提示字样之后再连接koi
- 连接未来板恢复固件,然后再重试一次
使用指引
提要
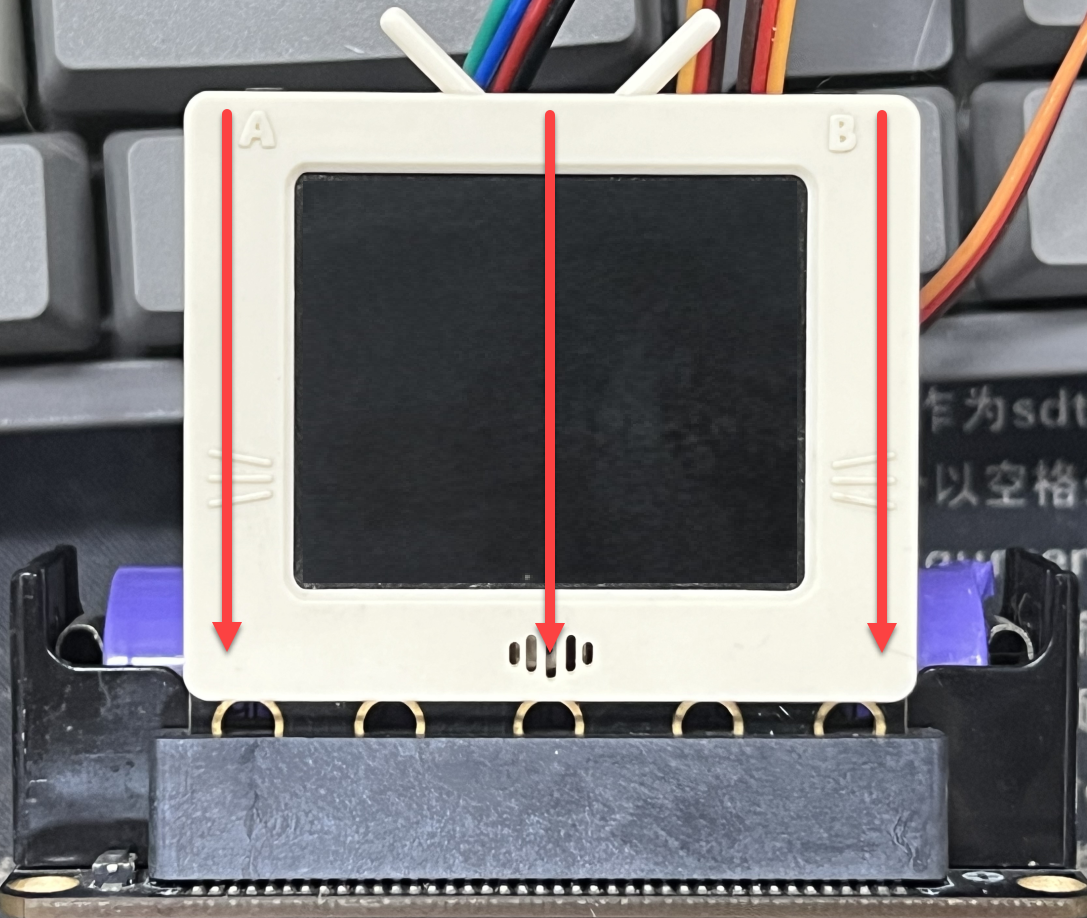
在之后的操作里,会用到未来版的一些传感器,请参考图示了解。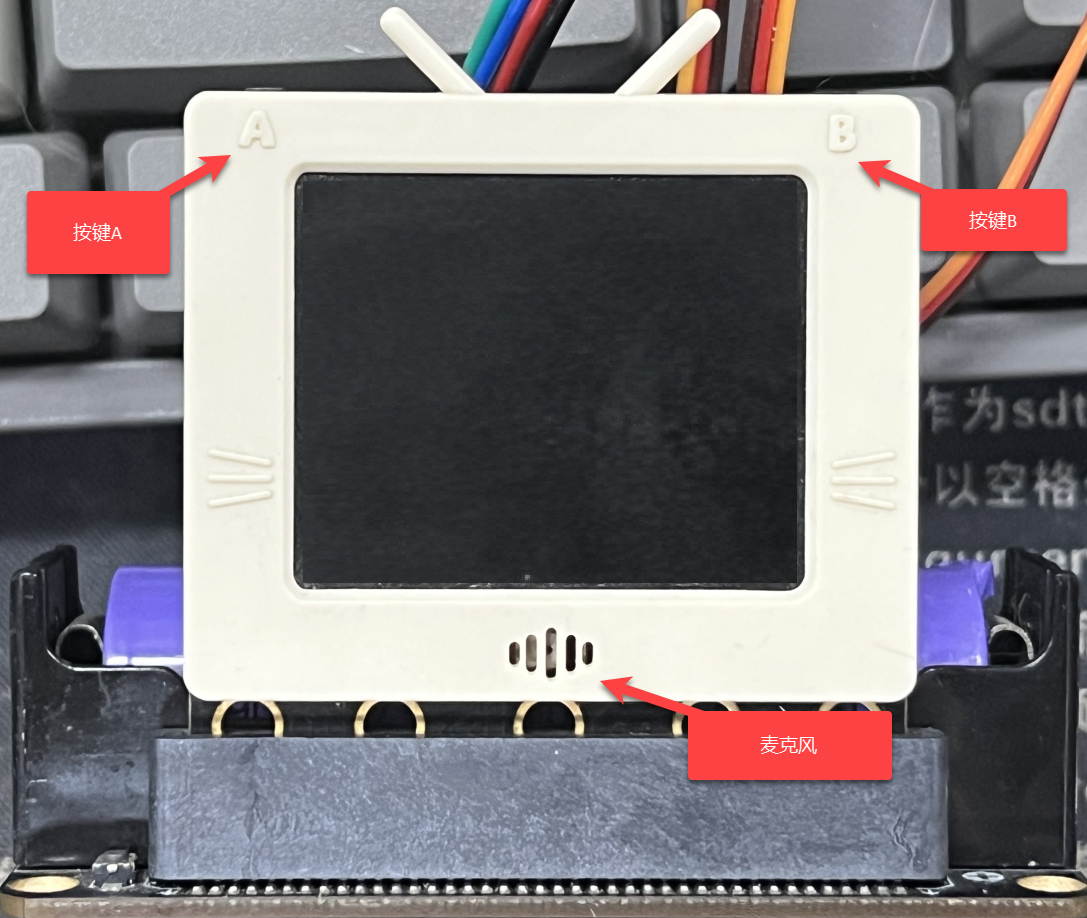
模型训练
在训练模型之前先将koi和手机的位置固定好
- 有红包情况,按下未来版a键位会训练一次,每训练一次都会听到一次蜂鸣器响起,需要训练十次。
- 被打开的红包,按下未来版b键位会训练一次,每训练一次都会听到一次蜂鸣器响起,需要训练十次。
- 其他内容,对未来板麦克风吹气,则会进行其他内容的训练。每训练一次都会听到一次蜂鸣器响起,需要训练十次。
注:训练其他内容的时候,每训练一次你可以适当变化手机屏幕的聊天内容
检测训练成果
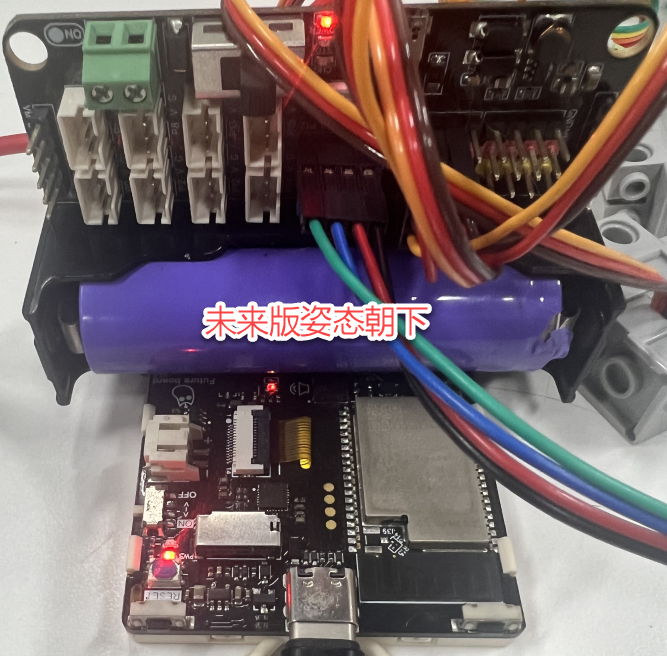
- 在所有内容训练完毕之后,将未来版姿态朝下。结束训练,请把下一个步骤看完在操作未来板
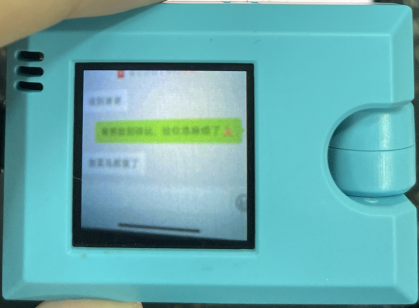
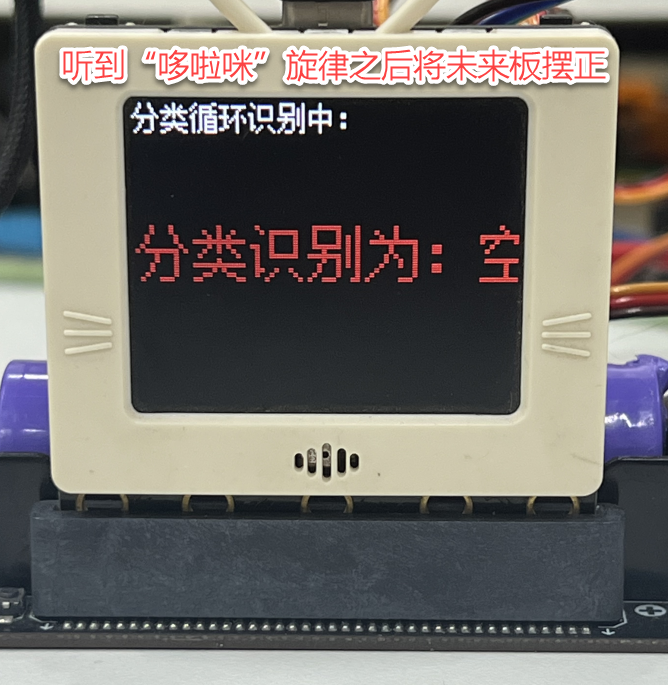
- 当听到未来发出“哆啦咪”的声音,表示已经结束训练,此时请立刻将未来版摆正
- 现在将koi对准手机微信画面,开始进行画面识别测试
- 有红包
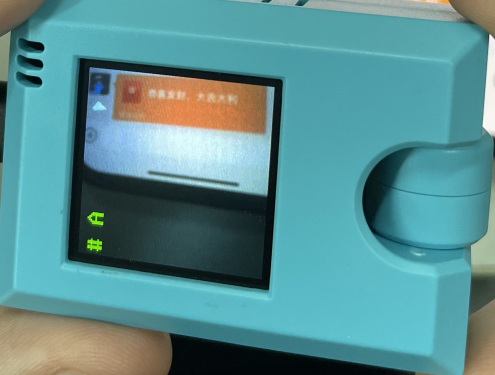
- 已领取
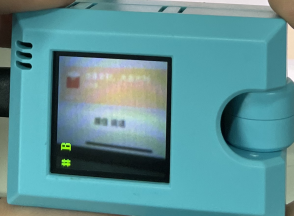
- 其他对话
- 有红包
- 如果识别内容和标签A(有红包),B(已领取),C(其他对话)对应上了则表示训练成功
- 此时再次将未来板姿态朝下(参考之前的图示),回到训练模式
- 然后将未来板左倾,保存训练数据,
- 在下次运行程序的时候,可以让未来板姿态右倾,加载模型数据,然后直接姿态朝下进入识别模式即可,不需要在训练
识别并不准确?
- 首先识别做不到百分之百准确,因为这个还是以教育娱乐为目的。如果有七八成一般就够了
- 可以增加训练次数,总训练次数为40张图片,所以要训练三个场景的话,最个场景训练13次
- 可能是之前进行了错误的寻来,可以重新进入训练模式通过上下摇晃未来板,待屏幕出现重置特征分类字样时候,重新训练(未来板姿态朝下可以切换训练模式或者识别模式)
训练数据保存失败?
- 在未来版左倾的时候,koi出现一大堆红色错误字样
这种情况一般是没有插sd卡导致,但此时再插入sd卡,是需要重启koi重新训练数据的。
舵机角度调整
在之前的“检测训练成果”的步骤中,成功识别到红包时,舵机应该是已经在运转了。但是角度可能不正确,所以需要单独调整舵机角度,然后在把正确的舵机角度程序上传到未来板。
- 断开未来版数据线,以及关闭robotbi上的电源,让未来板关机
- 重新接上数据线,并且打开robotbit电源,然后再到软件上连接未来版
- 此时不要上传程序,直接点击这个积木块,舵机就会直接动起来。
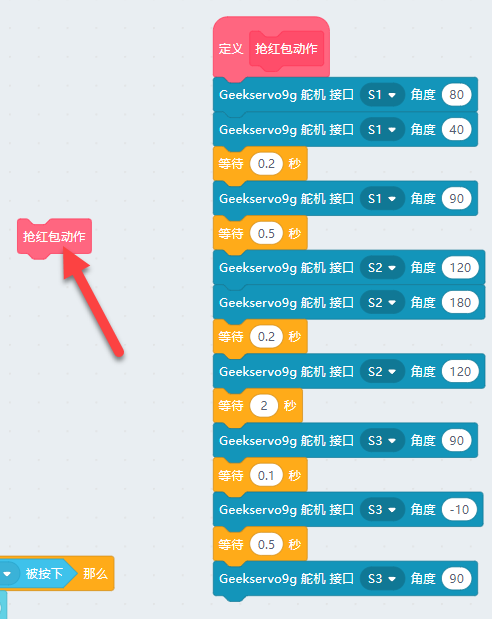
- 然后需要根据舵机做出的动作修改一系列角度
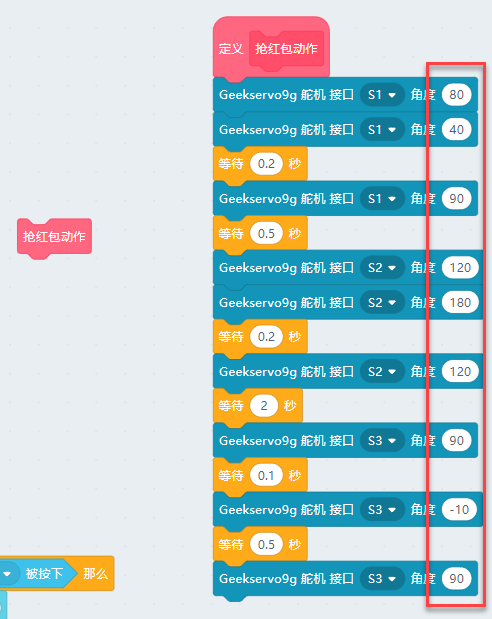
- 待到调试完毕,点击“抢红包动作”时,已经可以正确的打开红包了
- 此时再将程序上传,就大功告成了
- 最后不要忘了保存修改后的程序