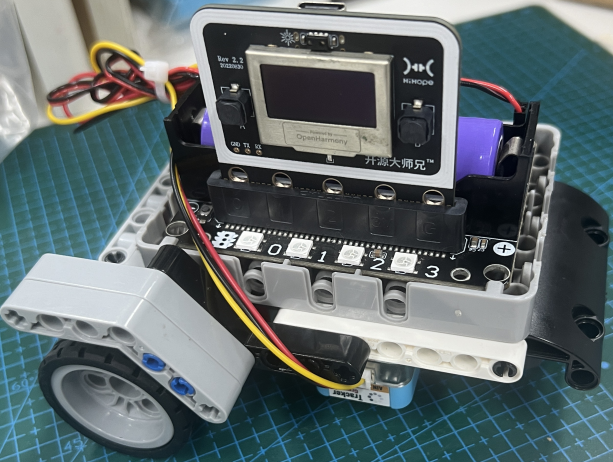
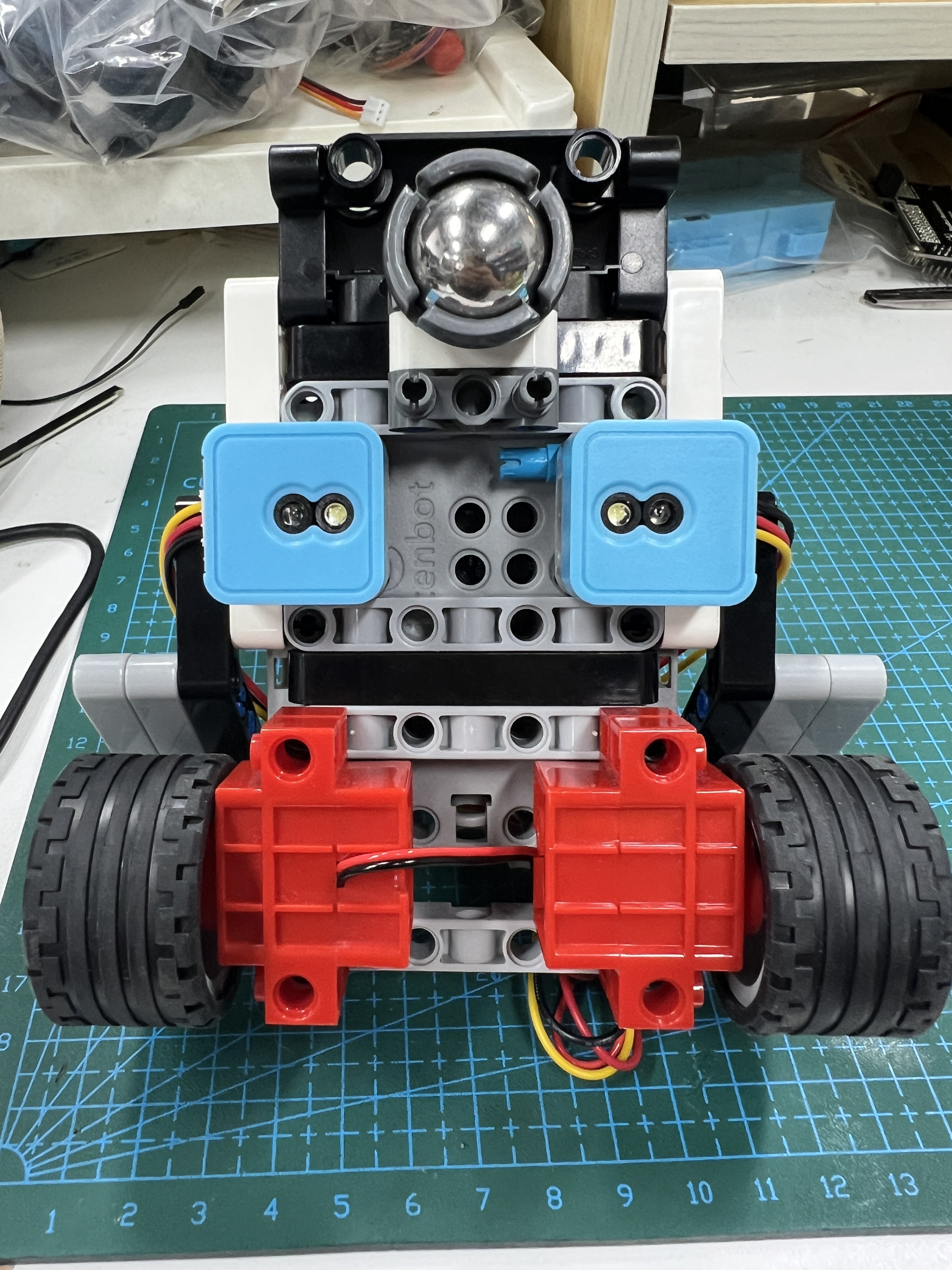
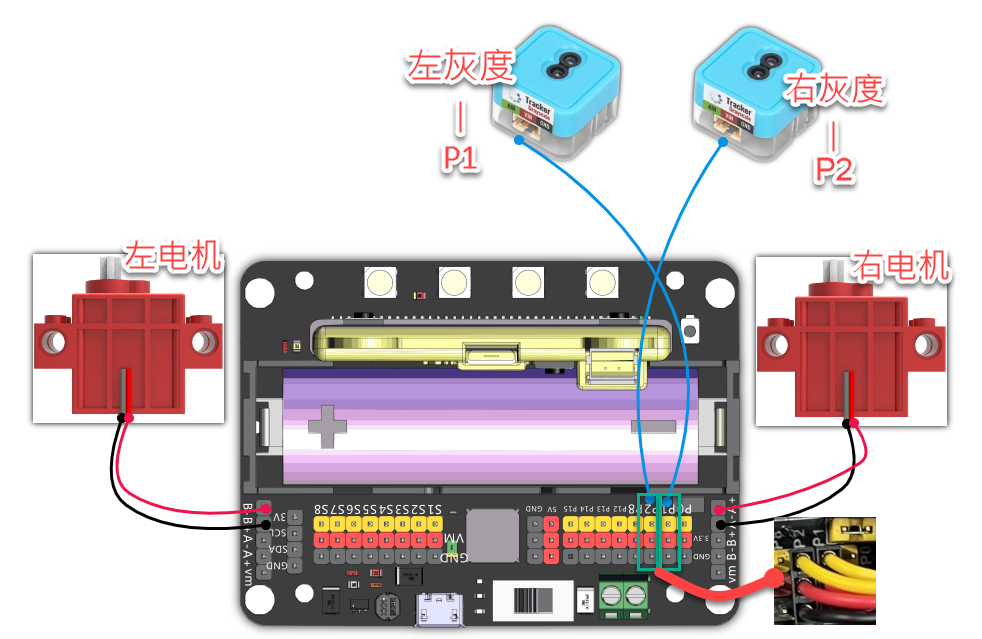
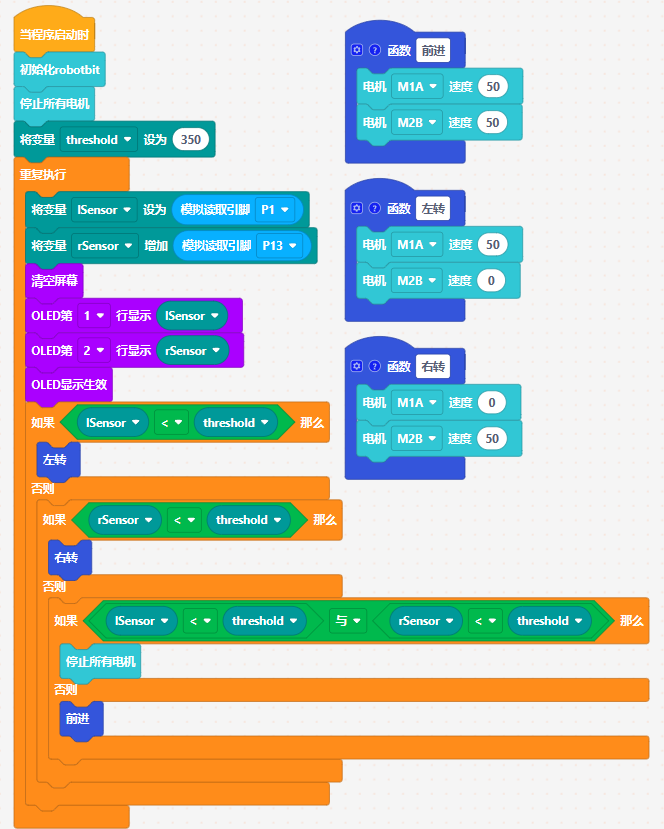
本页总览大师兄巡线小车简介使用大师兄开发板和robotbit以及方糖灰度模块制作的一个基本的巡线小车。小车结构我这里只是随意的搭建了一个最基础的小车,就不逐步的搭建说明了,有心的同学可以做到更好。线路连接程序编写在编写程序之前需要先添加扩展完整程序设置好灰度触感器的阈值,在传感器数值低于350时则表示已经触碰到了黑线,此时同侧的电机反转,另外一侧的电机正转,实现自转转弯。在没有触碰到阈值的情况正常直行即可。