OTTO机器人
淘宝购买
适用对象
- 个人机器人DIY爱好者
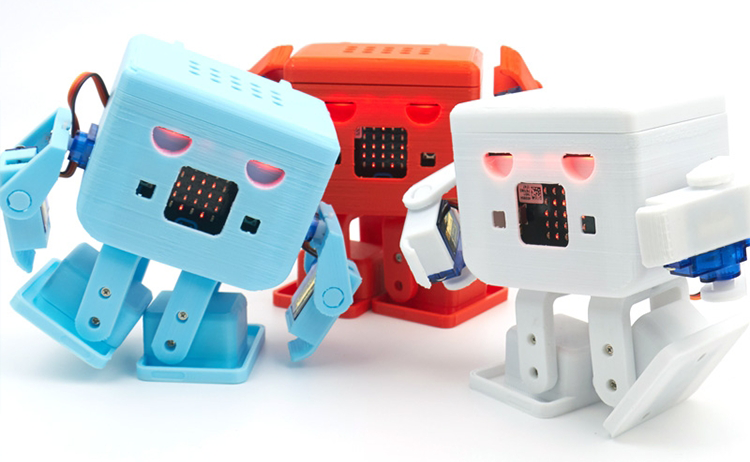
产品简介
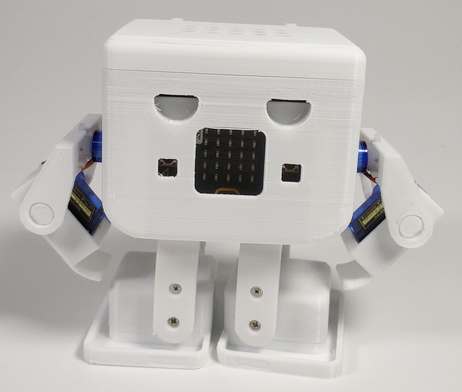
OTTO机器人全身共8个舵机关节,采用3D打印结构件组成,人形是它更具亲和力和趣味性的主要原因一直。通过图形化编程,使用者能够更轻易的按照意愿让机器人动起来。
产品特色
- 图形化编程上手快
- 人形机器人
基本参数
| 尺寸 | 135 x 70 x 111 mm |
|---|---|
| 净重 | 245g |
技术参数
| 供电方式 | 3.7~4.2V(18650锂电池) |
|---|---|
| 工作电压 | 3.3V |
| 工作电流 | 不超过1A |
| 编程平台 | Kittenblock / Makecode |
产品内容

| Micro:bit x2 | Robotbit | 18650锂电池 |
|---|---|---|
| 9g小舵机包 x8 | M2x6螺丝 & 螺丝刀 | OTTO打印件 |
组装OTTO
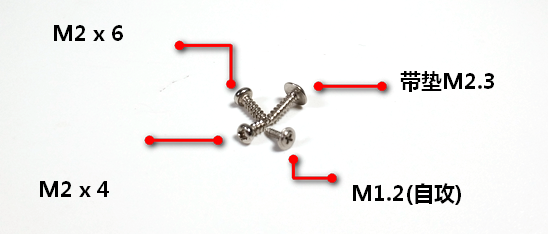
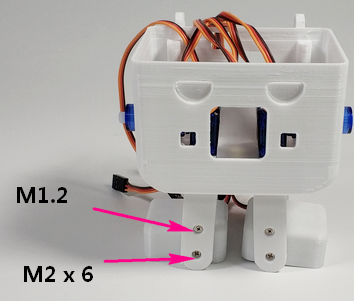
- 准备工作:认识需要用到的螺丝
组装要领:将结构件于舵机转轴固定前,一定要确保每个舵机的转轴在90°即中间位置,这是方便后续能够让机器人的关节可运转角度保持对称。(可以轻轻扭动舵机转轴,保证在2个极限位置的中间即为90°
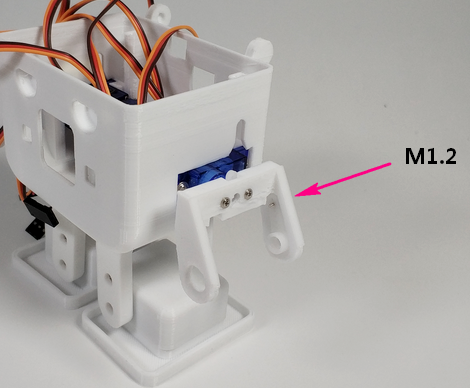
STEP1:取出舵机包里的摇臂,与打印件组成关节(摇臂需要对两头进行剪切,以刚好卡进打印件中
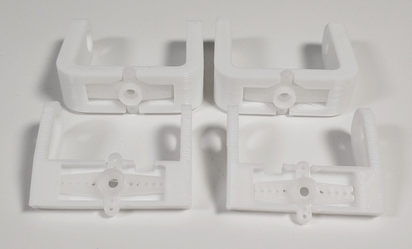
- STEP2:为4个关节均分别拧上 M1.2自攻螺丝 2颗固定

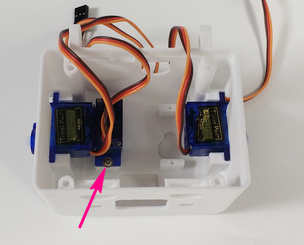
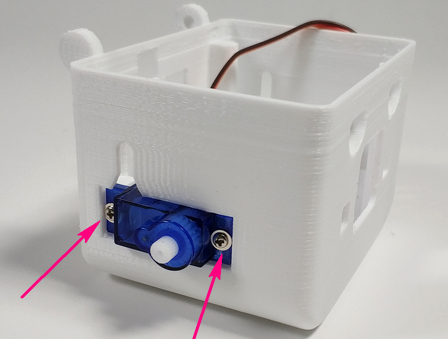
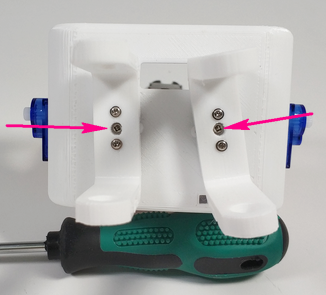
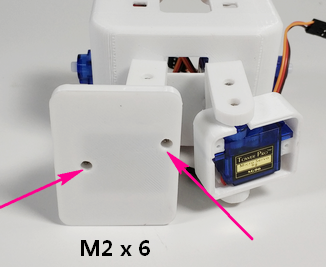
- STEP3:将4个舵机作为身体的4个主关节固定到壳子里,注意图中每个舵机均使用2颗带垫M2.3螺丝固定
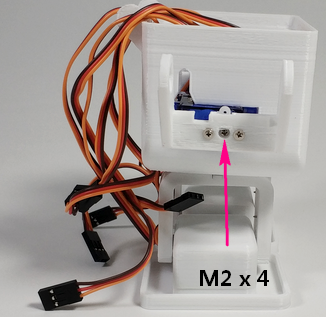
- STEP4:舵机和腿部关节分用1个M2 x 4的螺丝固定
- STEP5:安装舵机脚踝(先将舵机线穿过孔洞,再安装舵机


- STEP6:将脚与腿部关节连接,之后安装脚掌
STEP7:固定手臂于舵机,接着将舵机包内的半臂固定到手臂上
STEP8:将剩下的结构和舵机组成手掌,卡位固定于手臂,完成结构组装
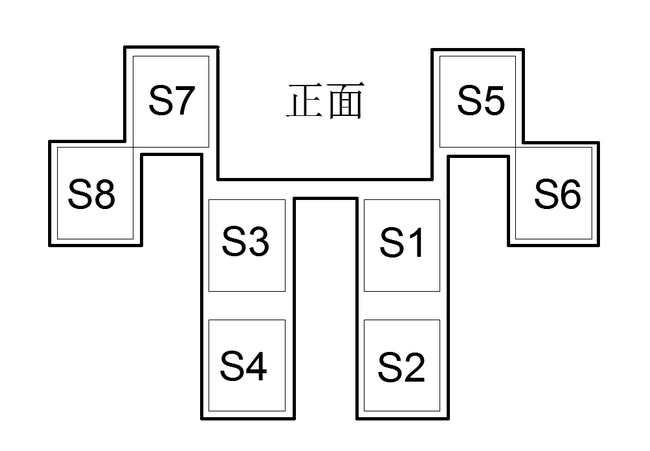
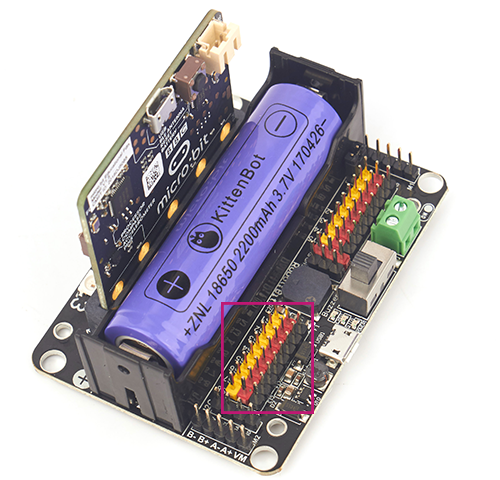
硬件接线
舵机按照左图示和序号对应Robotbit框框区域的引脚序号接插,注意舵机别插反(橙色线对应黄色引脚