快速开始
通过本章节的阅览,你将从零开始了解如何使用产品,如果你是没有编程经验的入门者,请一步不差跟着操作。
软件准备
信息
Kittenblock新用户请务必先转到以上页面——了解软件的安装和运行基本事项
🔗点击跳转
连接主控板
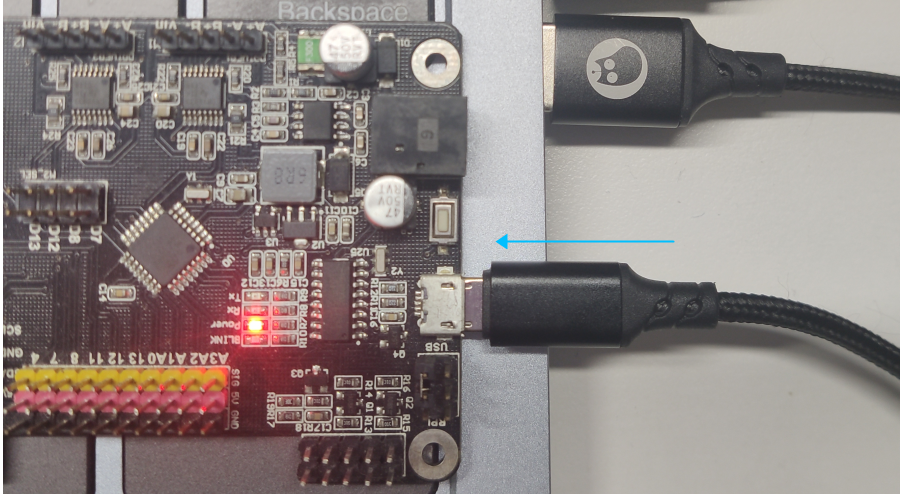
连接主控板分2个步骤,首先是硬件上使用microUSB(数据线)连接Rosbot主控板,接着在软件中连接设备串口
- 硬件连接
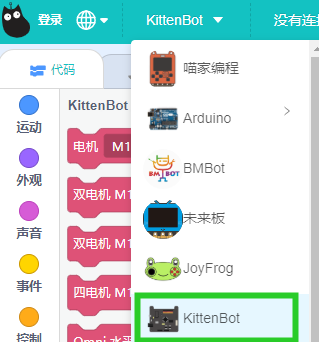
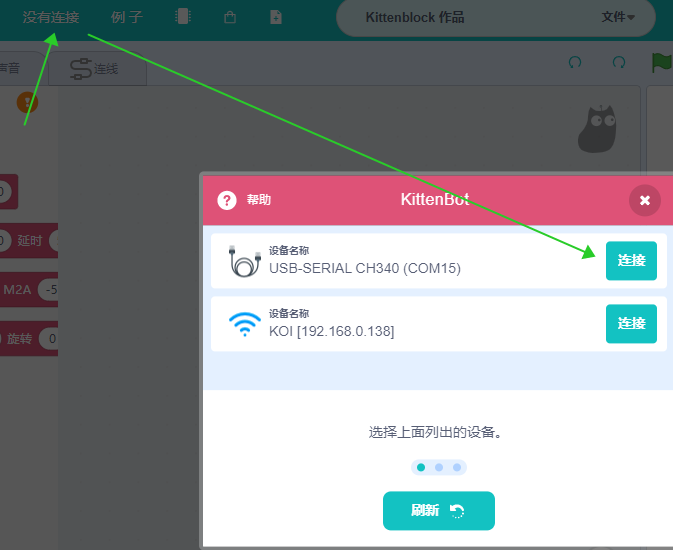
- 选择硬件——串口连接
危险
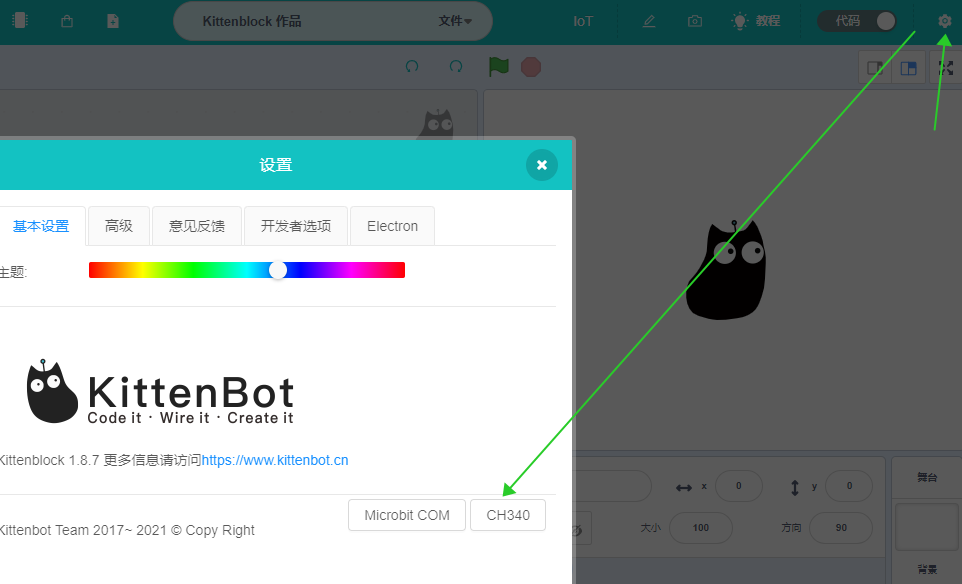
如果搜索不到串口
- 优先排除USB是否有数据通讯能力(部分USB线仅仅只能充电)
- 可能缺少串口驱动,在设置页面知道CH340按钮,点击安装
在线交互
成功连接串口后,可以通过直接点击积木块的方式来控制Rosbot,这样的好处是可以快速看到一些传感器的返回值或控制一些传感器设备。
信息
在线运行必须要先给Rosbot烧录一个通讯程序,而后我们在软件内点击积程序积木块则会将对应的通讯指令通过串口发送给Rosbot,有Rosbot按通讯程序指定的效果执行
- 点击 恢复固件 按钮 —— 选择主固件 —— 等待上传完成

信息
固件上传完成后,别忘了重新连接串口!
- 由于目前是Rosbot单板实验,所以我们先拖出控制板载LED灯的积木块验证一下在线通讯功能
搭建如下程序积木并点击,当积木夸亮起来时证明程序运行,此时Rosbot上的蓝色灯间断闪烁~
上传程序
当需要主控板脱离电脑运行指定程序时,就需要将程序上传到硬件里也称作程序烧录
危险
与在线运行不同,但程序上传到Rosbot后,将无法进行在线交互,因为每次烧录都会将上一次的程序擦除
同样是上一步的程序,在右上角找到代码切换按钮调出代码转译后点击上传——等待上传成功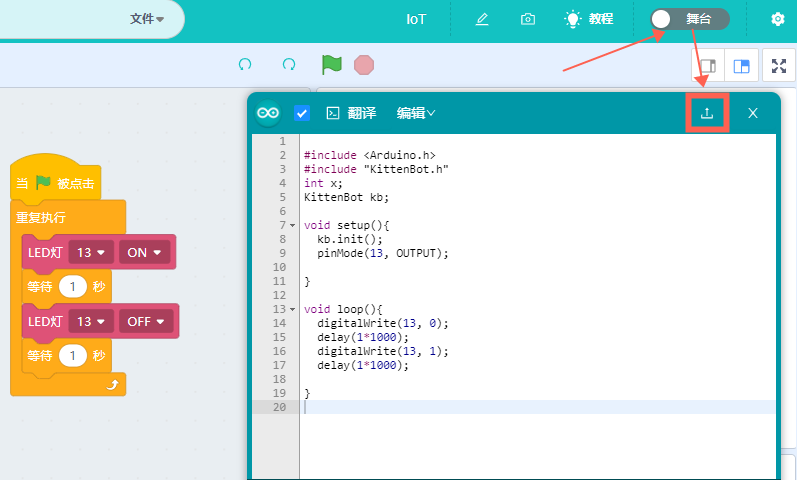
[