在Python编辑器中应用
由于Python编辑器目前是在线网页版,所以需要先安装喵家的Klink
STEP 1 安装
优先将从小喵科技官网下载的klink压缩包进行解压
- windows用户直接解压到自定义文件夹即可
- mac用户解压后将klink拖入应用程序中再打开
STEP 2 更新Klink
- 首先点击更新Klink,稍作等待

- 更新完毕后自动重启(当前最新版为1.1.9
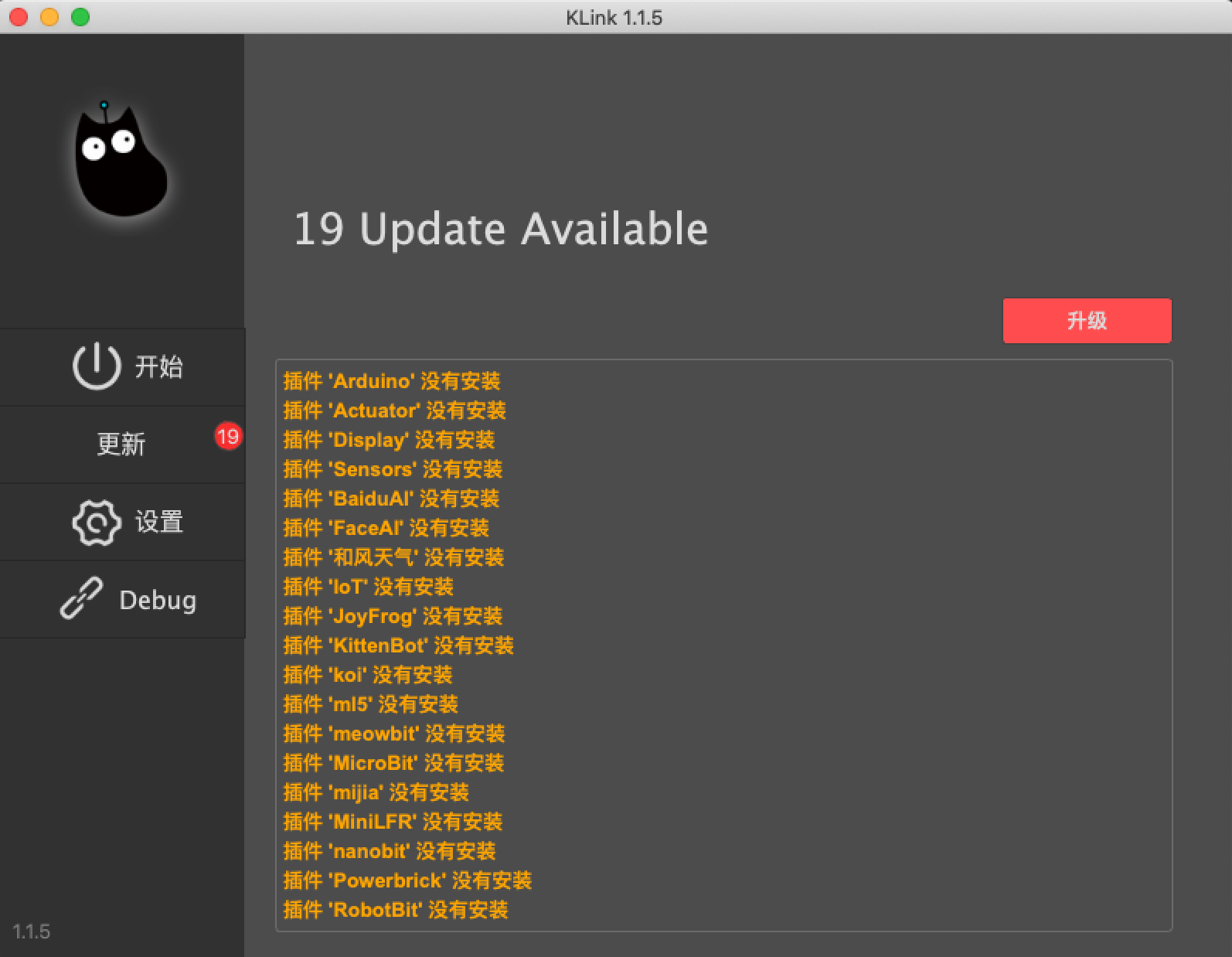
STEP 3 更新插件
第一次安装Klink或者当Klink部分插件有更新的时候,可以看到如图中左侧更新处有红色圈圈提示,并且右侧有详细的插件状态,只需点选升级即可。(这个过程初次会有些漫长,耐心等待,注意不要在加速器下,会很慢.更新完毕后klink会自动重启。如果不慎在更新中中断了klink,需要在任务管理中关闭进程后重开
STEP 4 前往编程页面
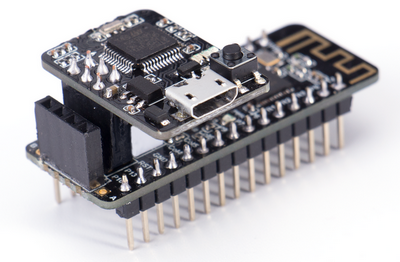
- 将nanobit插上下载器,并连上数据线
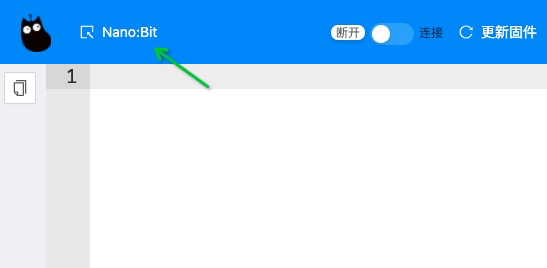
- 左上角,选择硬件Nano:Bit
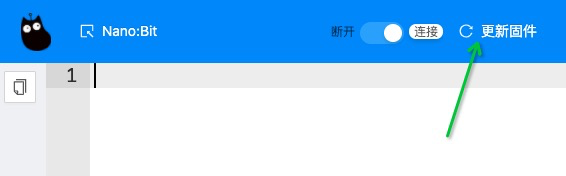
- 连上串口(注意你需要确保有mbed串口驱动,若没有先安装一下吧 点击下载驱动

- 更新固件,因为考虑下面的例子提到在线运行,而在线运行的话,需要一个通讯固件
STEP 5 导入模块
nanobit使用的主控与microbit一样都是nrf51822,所以暂时我们可以先大部分使用microbit的原生库
具体可以查看 micropython API
from microbit import *
在线运行程序
from microbit import *
while 1:
print('x:' + str(accelerometer.get_x()))
print('y:' + str(accelerometer.get_y()))
print('z:' + str(accelerometer.get_z()) + '\n')
sleep(1000)
点击运行后,可以看到控制台窗口打印出加速度计数值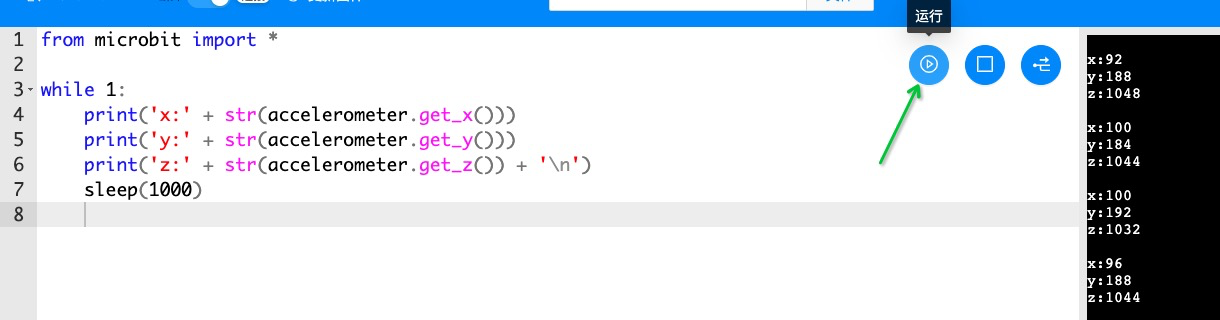
查看函数方法
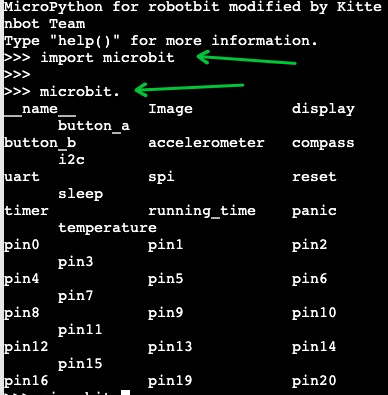
除了通过API文档查看,也可以通过连接硬件后在REPL中查看
- import microbit
- microbit.(按下Tab键
上传程序
(功能在完善中