使用教程
资源包下载
如何快速使用
下载资源包并解压后,可以看到下面2个文件夹,分别是迷你车和麦克纳姆轮机器人2个不同造型案例
我们以最重要的Mecanum(麦克纳姆轮机器人)为例,点进Mecanum的文件夹

打开building.pdf根据步骤搭建好机器人造型,注意事项包括轮子的安装和硬件的连接,请一定规范按照所给的图示进行安装,否则会导致与预期效果不匹配
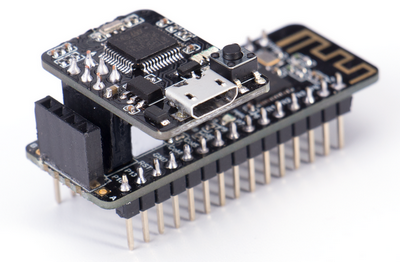
确保你的kblink下载器和nanobit正确接插
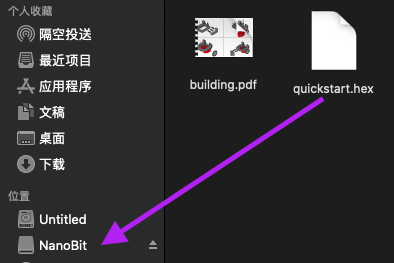
- 接上USB线,可以看到电脑出现Nanobit字样的盘符

- 将quickstart.hex拖进这个盘符里即可下载程序
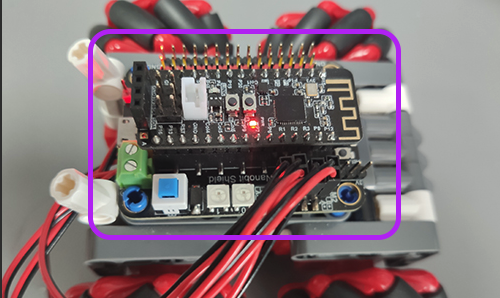
- 将nanobit装到扩展板上,且一定按照图示方向装。之后给扩展板装上电池,打开电源
如何进阶遥控
基于2.4g无线的硬件通讯遥控算是不涉及手机app开发以外最容易上手的方式
危险
需要额外的硬件:Nanobit、Microbit 或 Microbit+JoyFrog
- 点开control文件夹,可以看到2个文件夹,分别是JoyFrog-control(使用microbit和JoyFrog手柄作为遥控)、microbit-nanobit-control(使用单独的microbit或者nanobit作为遥控)
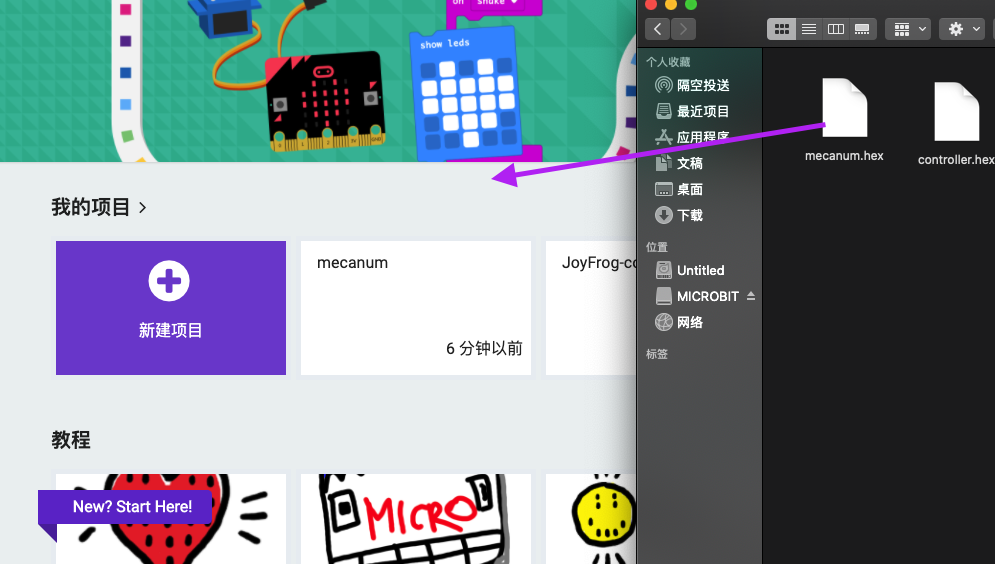
- 以JoyForg-control为例(表示使用另一块microbit+JoyFrog手柄作为遥控),将mecanum.hex拷贝进小车端的nanobit,将controller拷贝进microbit

- 你会看见microbit点阵显示一个爱心,程序下载成功。此时你可以利用手柄摇杆控制麦轮机器人
如何查看和修改程序
如果你想修改或者添加一些额外的效果,亦或者想看看程序,可以前往 https://makecode.microbit.org,将.hex文件拖进去就可以啦