使用手册
如果您是第一次使用,建议在进行duckybot的整体编程之前,先熟悉 KitB 的 8 个模块。本文档假设您已经熟悉在 MakeCode 下使用 KitB 模块。
使用前的检查
- 请确保您的 jacdac-Power 模块已插入 3.7V 锂电池组或 Type-C 数据线(因为 jacdac-Servo 需要从 jacdac-Power 获得 5V 电源才能正常工作)
- 请确保机器人已按照说明书组装
- 请确保 jacdac 模块已按照说明书正确连接

使用的组件
- 1x KitB 卡通机器人
- 1x 微型 USB 线缆
连接
PC-〉USB -〉KitB duck

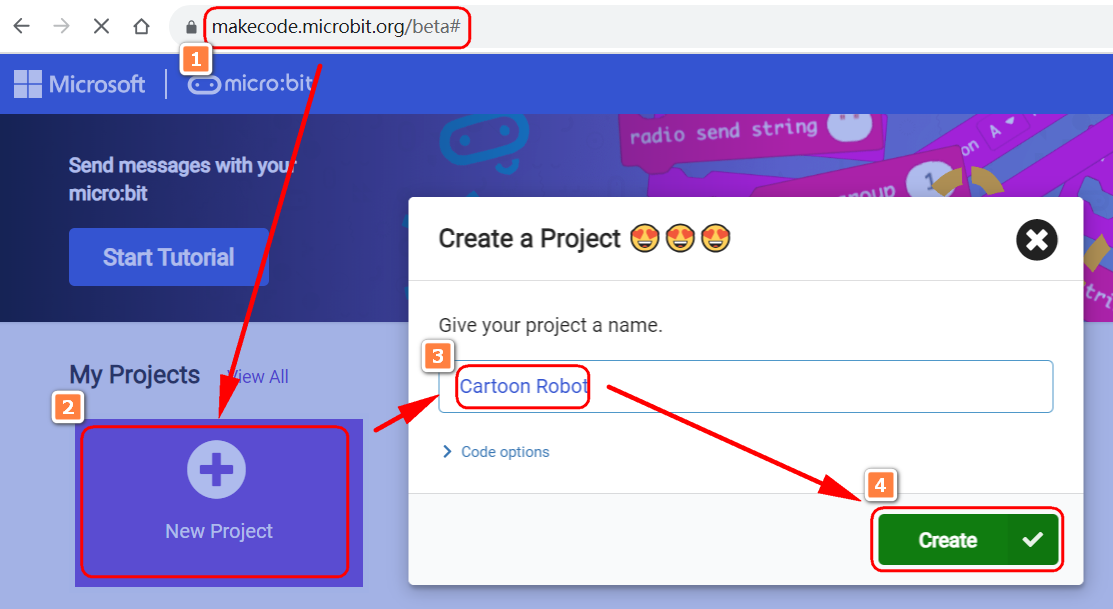
编程平台
https://makecode.microbit.org/beta
创建新项目
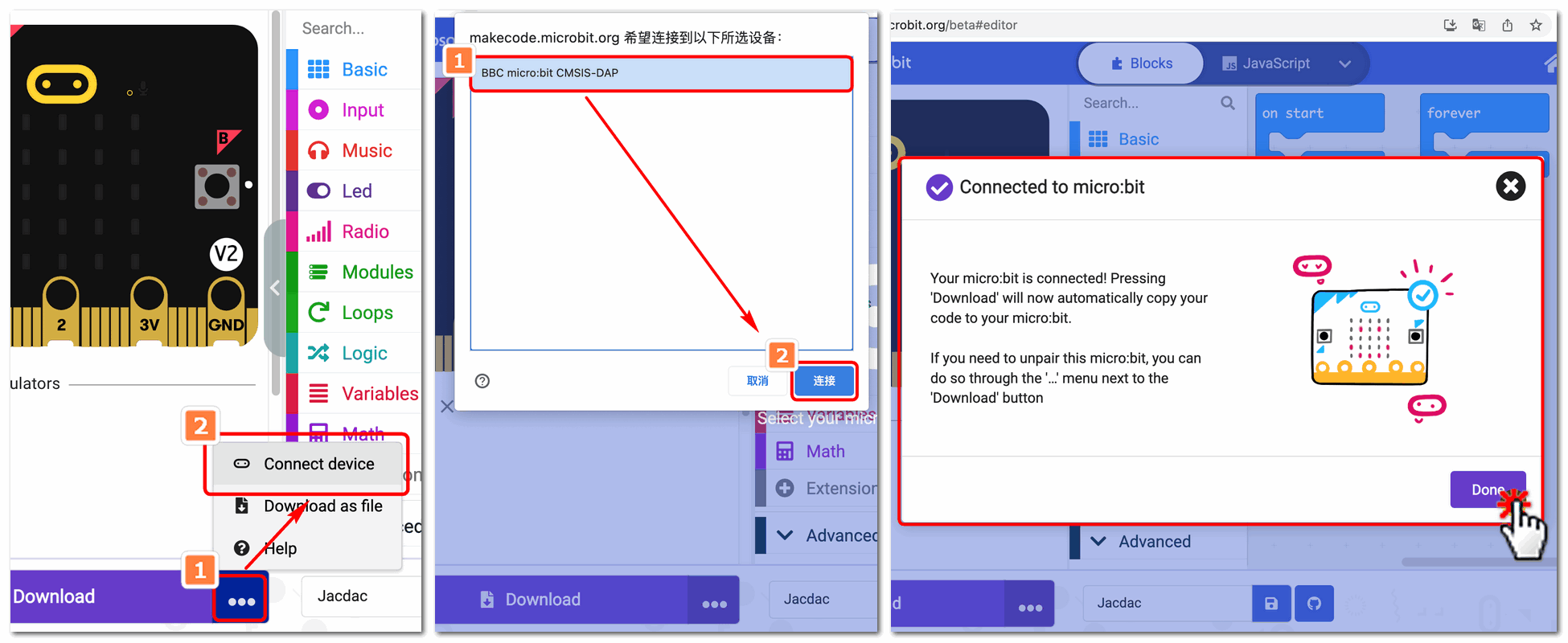
建立连接
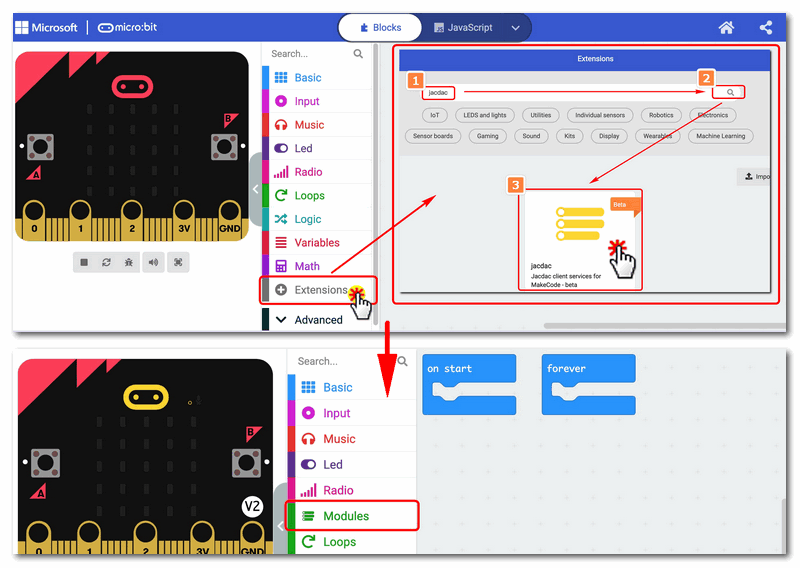
添加 Jacdac 扩展
扩展——Jacdac
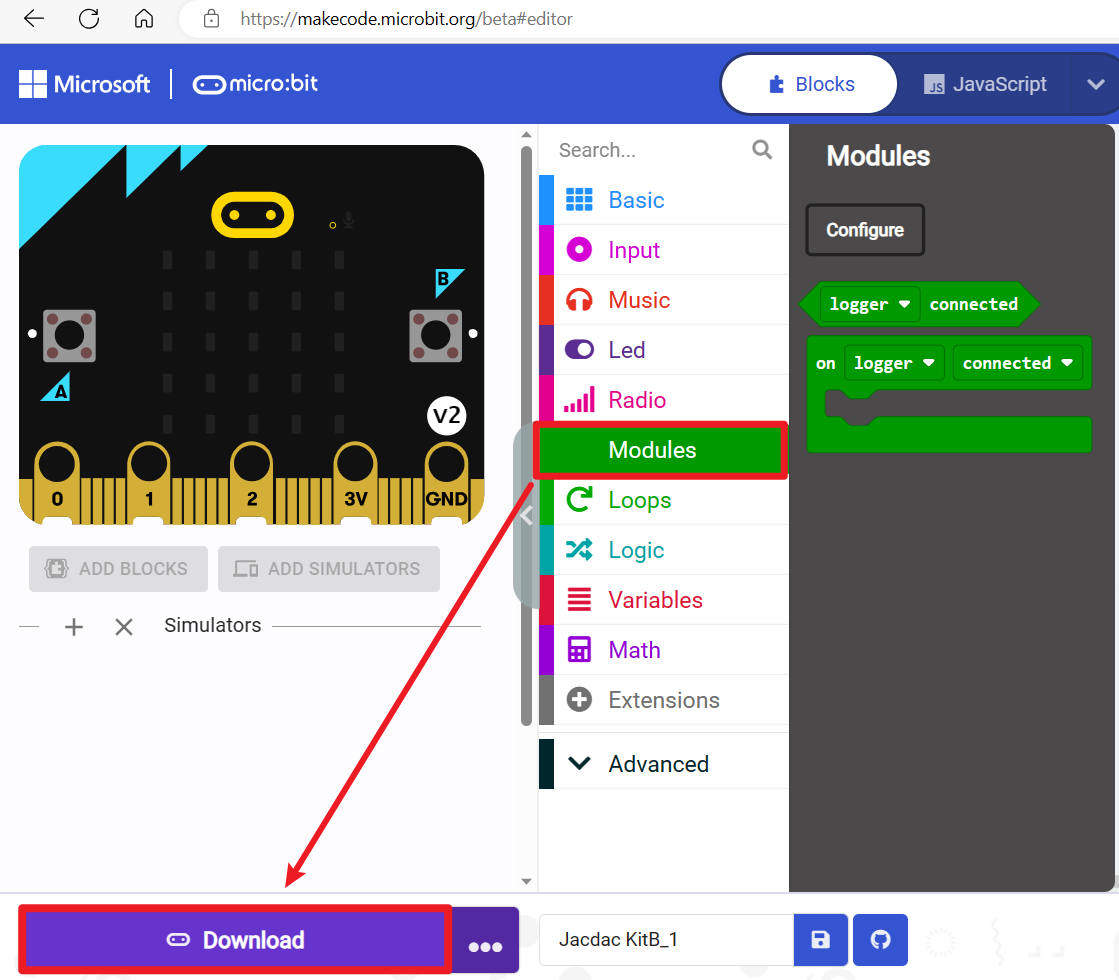
下载空白程序
加载 Jacdac 插件后,您需要先下载一个空白程序。空白程序用于初始化 Jacdac 模块。下载完成后,Jacdac 模块将被初始化,Jacdac 模块将能够正常工作。
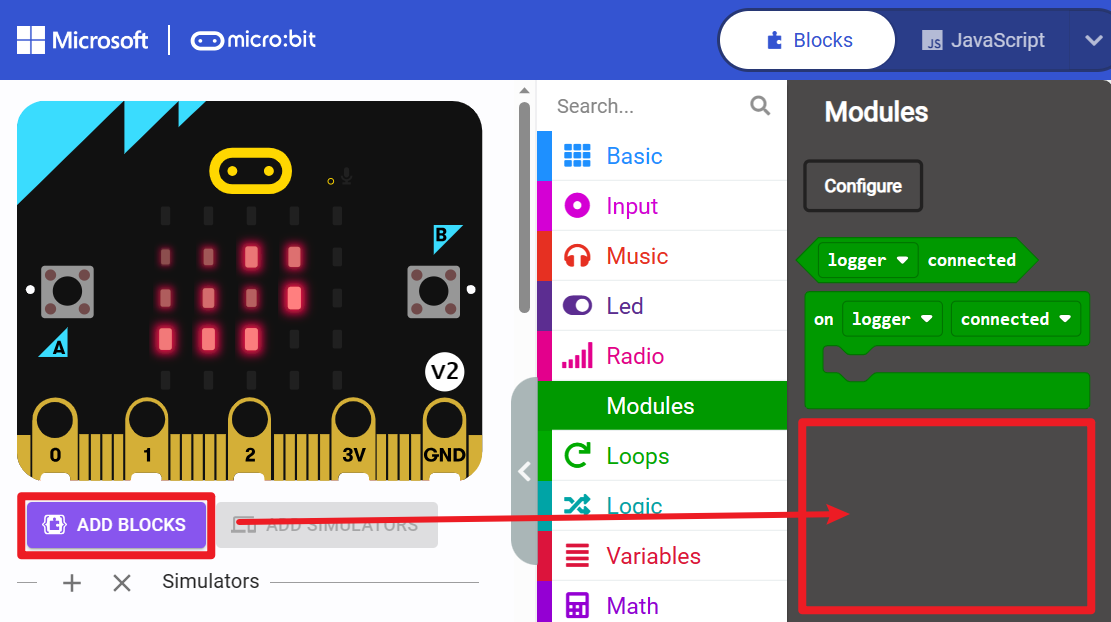
模拟器
在模拟器中,您可以看到 KitB 的所有模块。
“添加块”
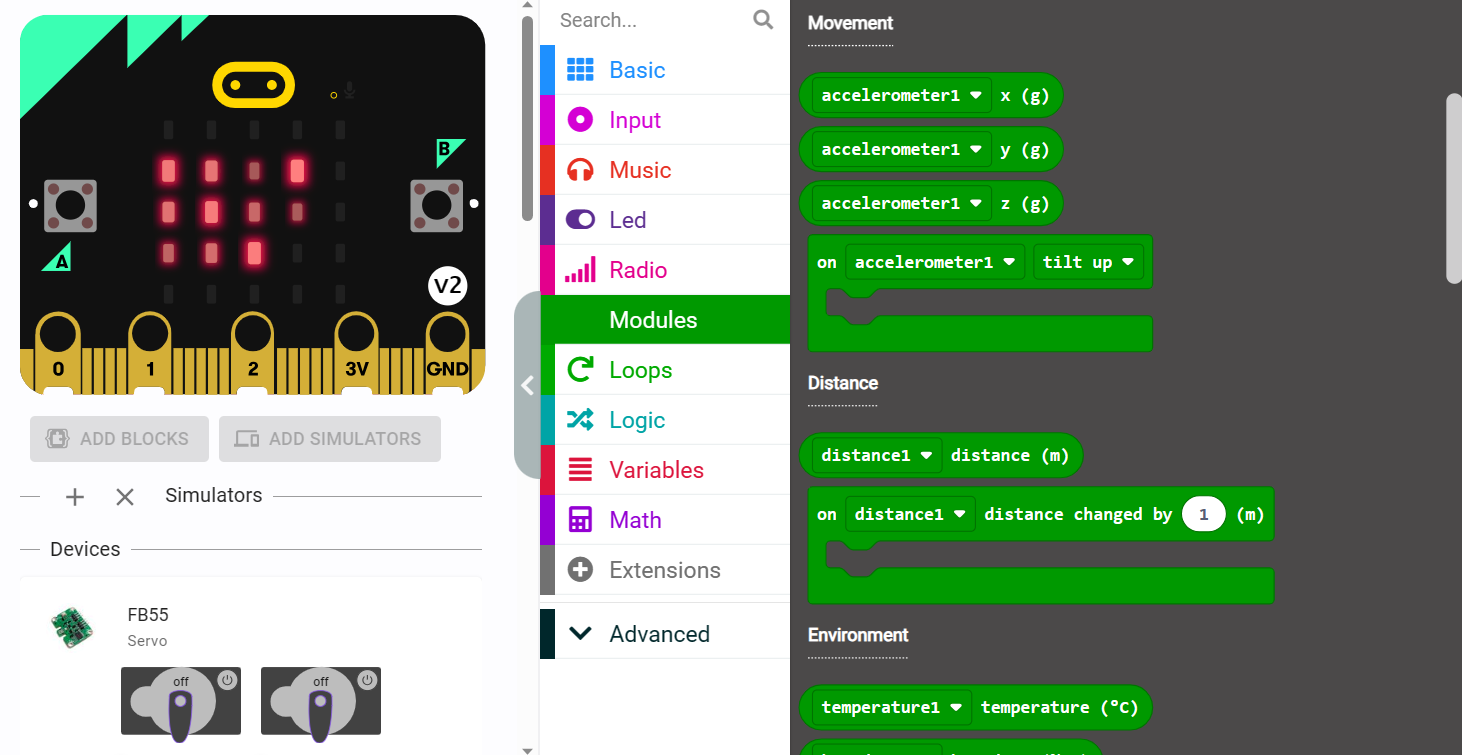
将所有模块添加到模块列。
编程
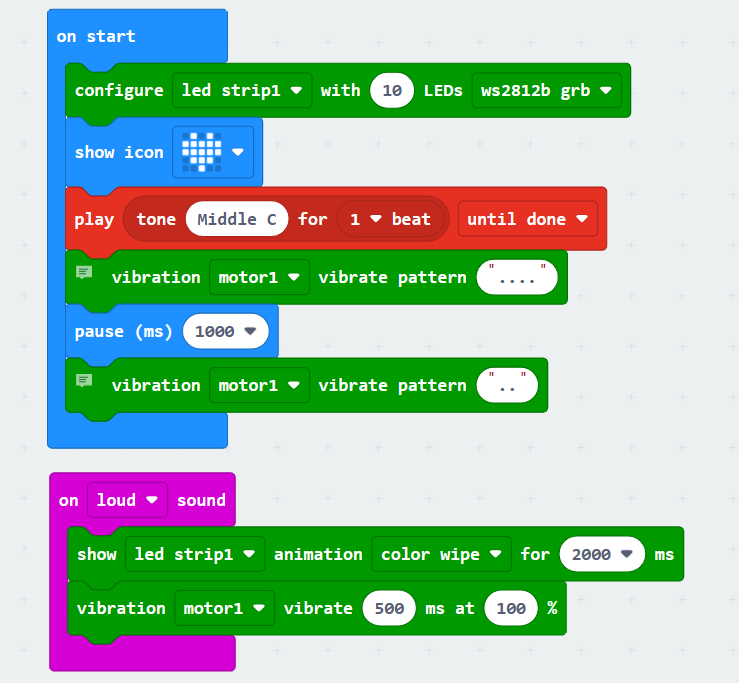
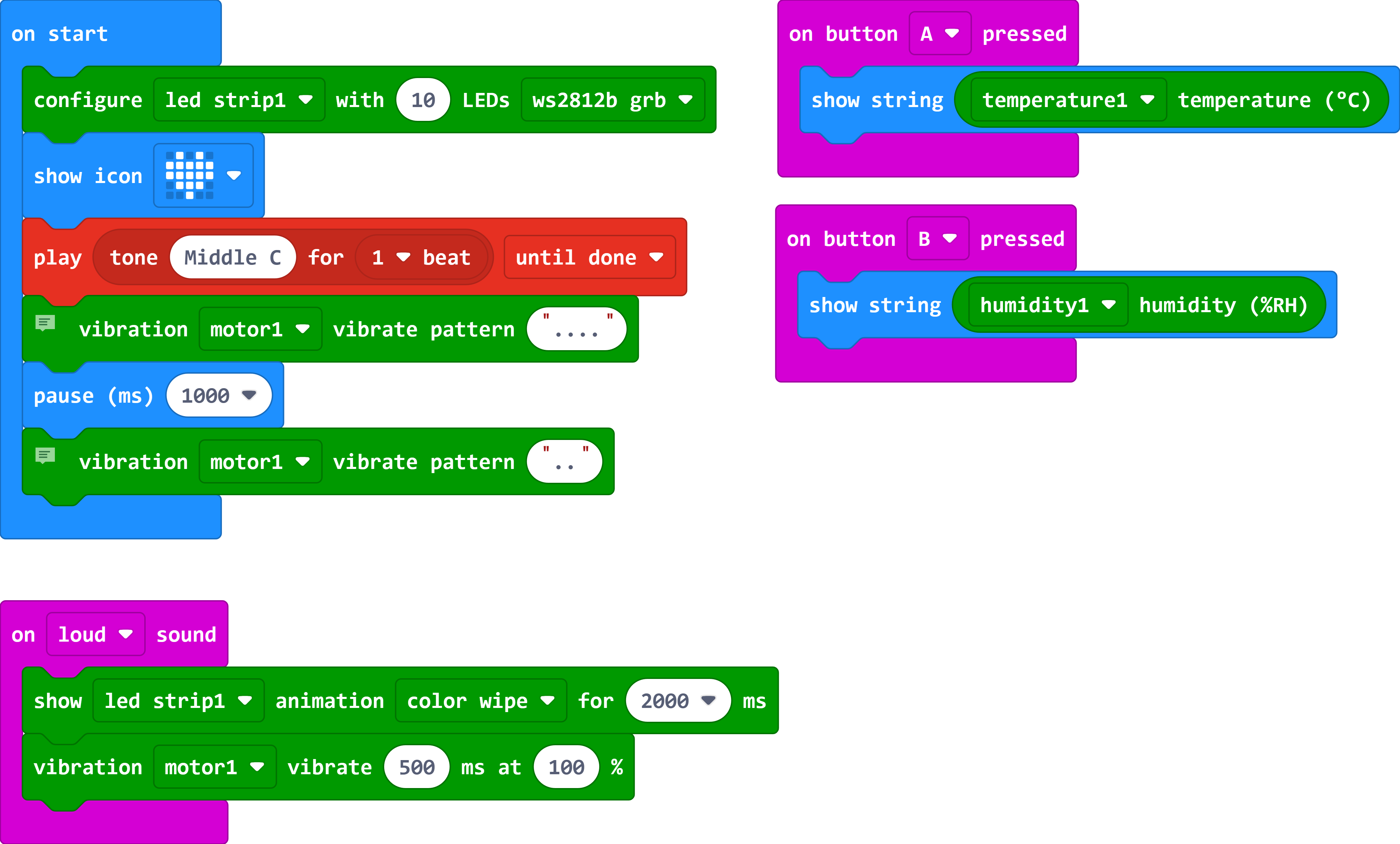
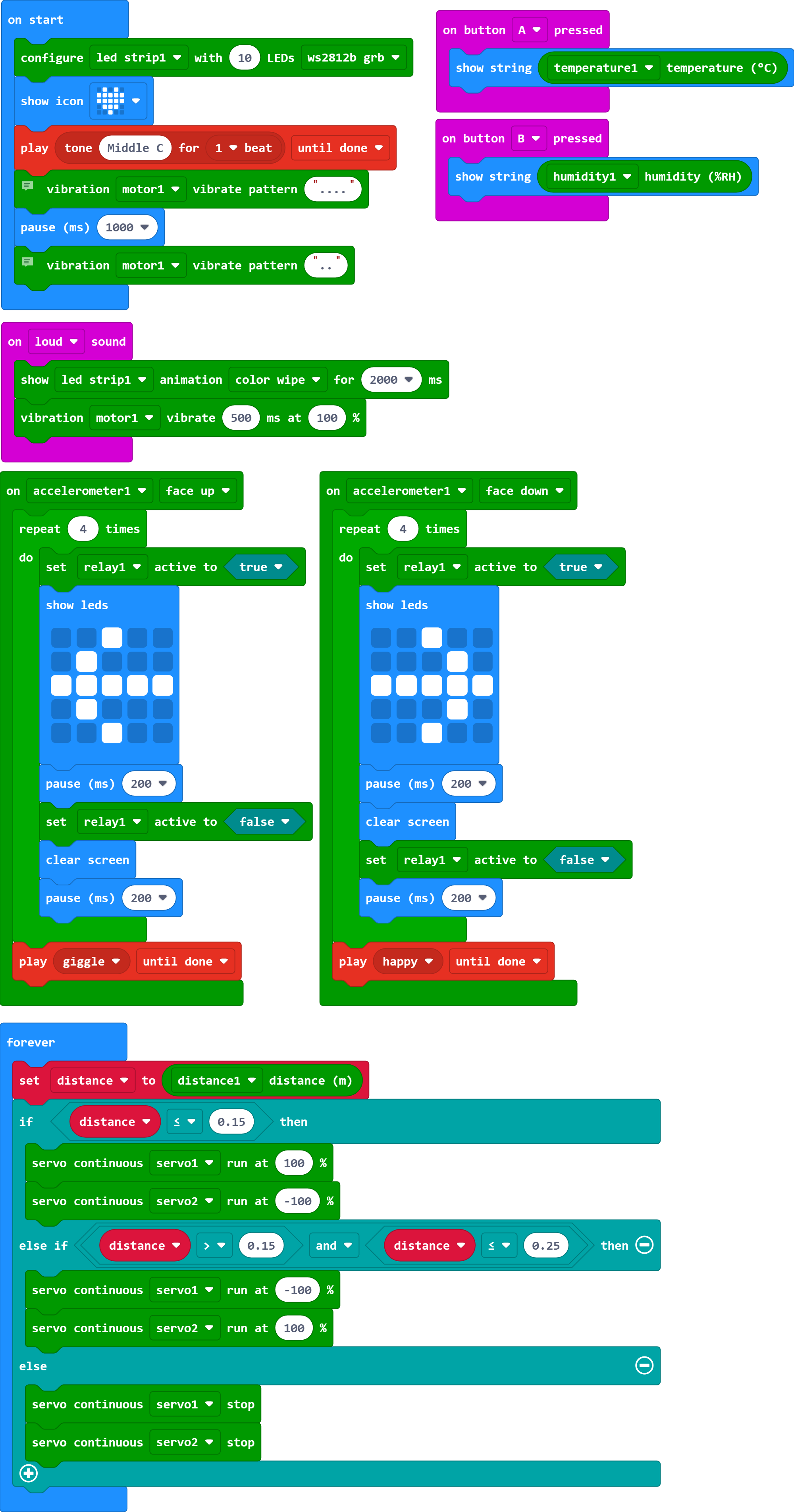
该起床了
为 RGB 灯带和震动电机(触觉输出)编程
- 编程块
- 效果
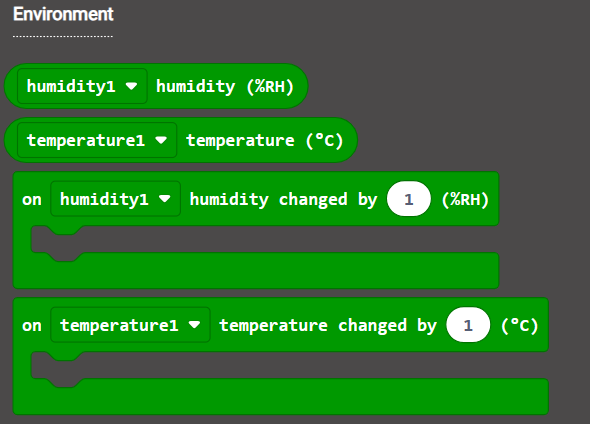
我们来测温测湿
使用温度和湿度传感器检测环境的温度和湿度
- 编程
- 效果
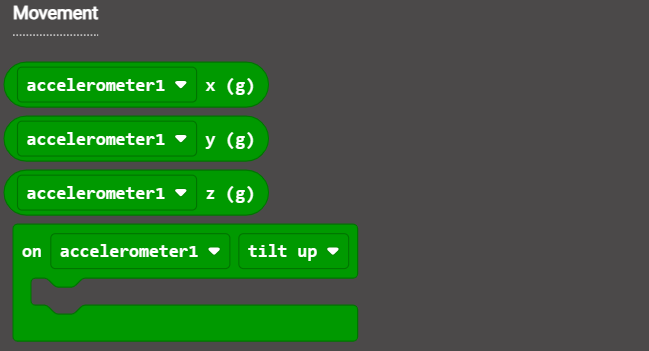
跌倒了,我会站起来
使用加速度计检测机器人的加速度,当加速度大于 2g 时,机器人会站起来
- 编程
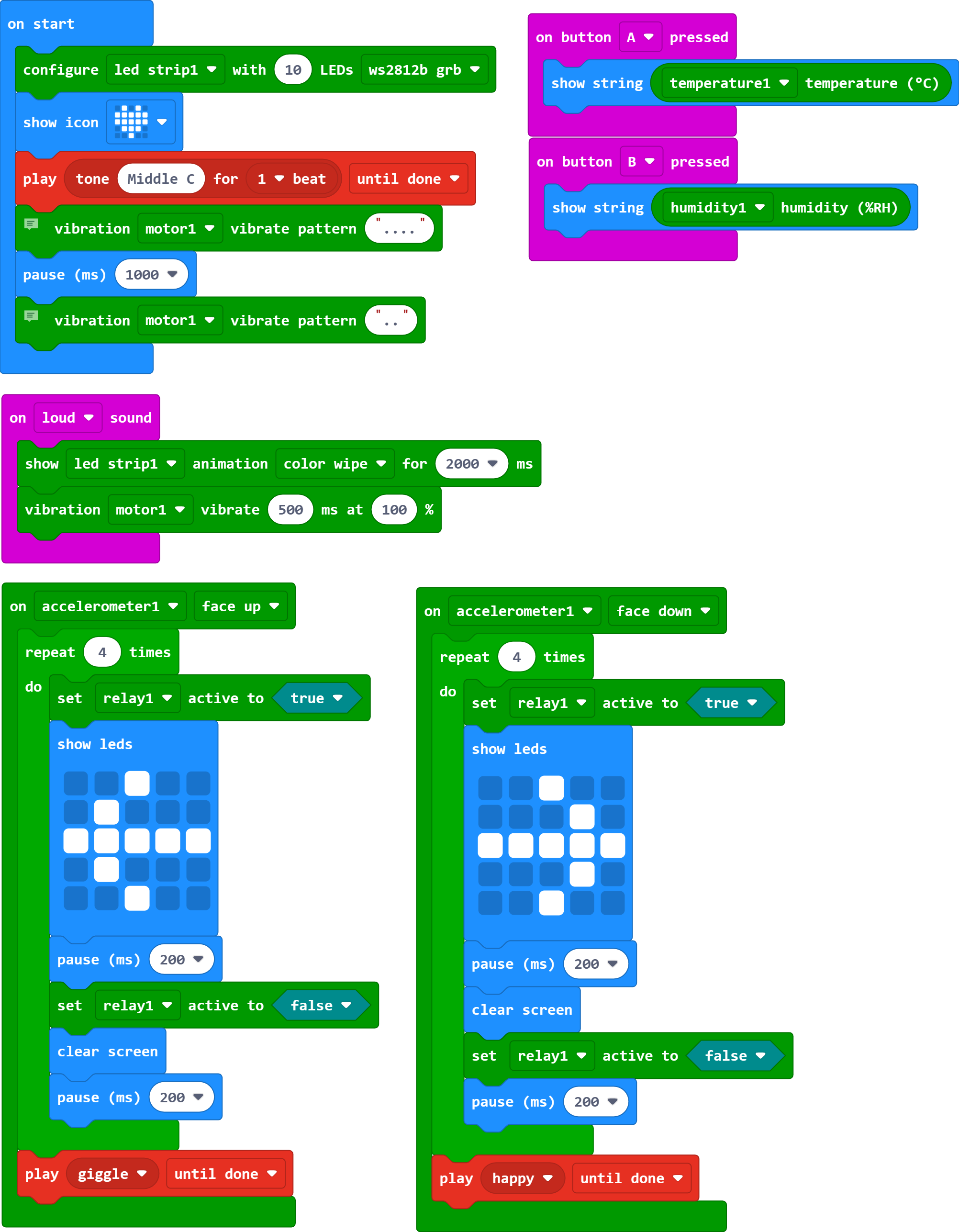
- 效果

请跟我来
使用超声波传感器检测机器人与物体之间的距离。当距离小于 15CM 时,机器人会向后移动。当距离大于 15CM 且小于 25CM 时,机器人会向前移动。当距离大于 25CM 时,机器人会停止移动。
开机,Jacdac-Power 需要插入锂电池

靠近鸭子(小于 15cm)
手放在(15CM-25CM)