2KG灰色舵机
2KG灰色舵机是喵家Geekservo系列执行器,和普通舵机一样均采用脉宽控制,可达到0~360°的宽角度区间转动,是一款适用于乐高搭建等机器人关节类应用场景的执行器。
参数
| 尺寸 | 40 x 24 x 24 mm |
|---|---|
| 净重 | 20g |
| 工作电压 | 3.3V~6V |
| 额定电压 | 4.8V |
| 堵转电流 | 900mA |
| 打滑电流 | 700mA |
| 最大扭矩 | 1.6±0.2 kg-cm (4.8V) |
| 角度转速 | 60°/0.14s |
| 工作电压 | 3.3V~6V |
| 额定电压 | 4.8V |
| 脉宽区间 | 500~2650us |
接线
注意线序的颜色切勿反接,舵机允许接在S1~S8的引脚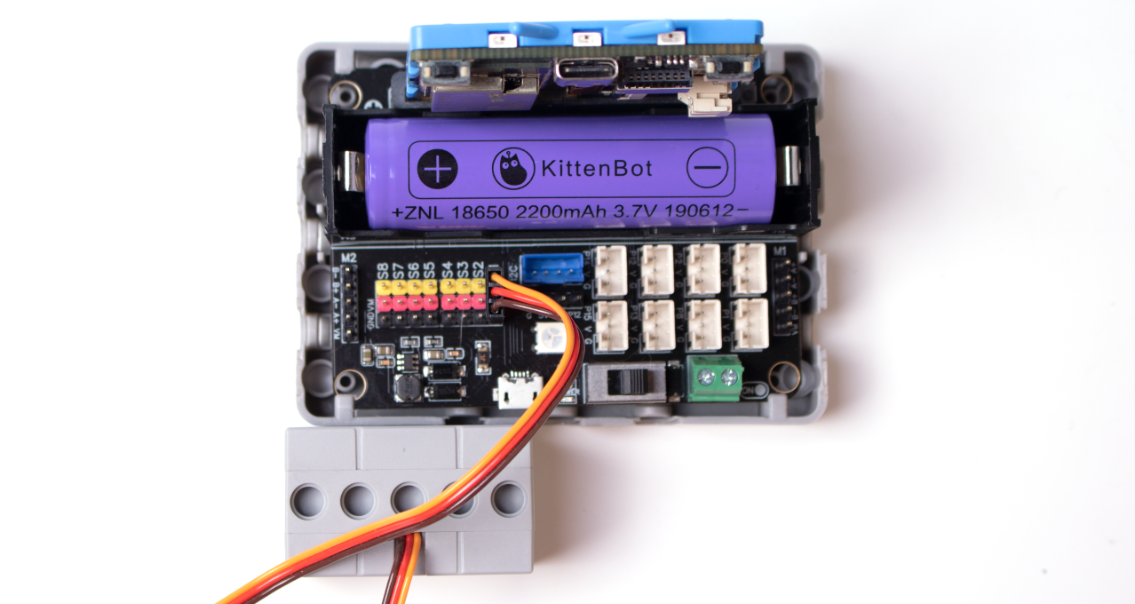
危险
使用时务必打开Robotbit电源开关
编程
使用Kittenblock
选择在线运行或离线上传的方式运行程序查看效果
如果还不清楚如何在线运行或离线上传请参照 快速开始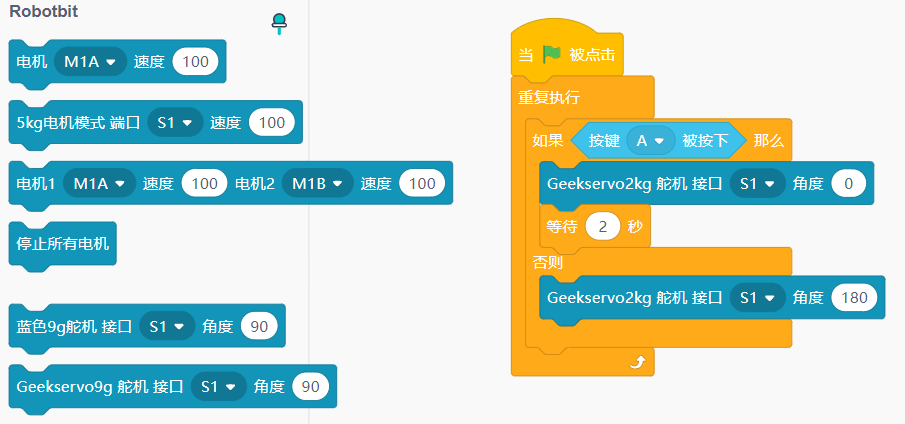
使用Micropython
2KG舵机函数控制
geekServo2k(index, degree)
- index:舵机接口,1~8分别代表S1~S8
- degree:目标角度,可填写0~360
from future import *
import time
import robotbit
# 使用robotbit必须要先初始化
robot = robotbit.RobotBit()
while True:
if sensor.btnValue('a'):
robot.geekServo2kg(1, 0)
sleep(2)
robot.geekServo2kg(1, 360)
2KG舵机脉宽控制
pulse_width(index, v)
- index:舵机接口,1~8分别代表S1~S8
- v:脉宽时间,范围在500~2650,分别对应舵机0~360° 危险
这个方法也可以控制其他舵机,如蓝色的9g效果舵机,则使用脉宽时间500~2500us对应0~180°
from future import *
import time
import robotbit
robot = robotbit.RobotBit()
while True:
if sensor.btnValue('a'):
robot.pulse_width(1,500)
time.sleep(2)
robot.pulse_width(1,2650)