使用教程
前言
需要对Kittenblock或Makecode编程平台的使用有所了解,包括会涉及到的Kittenblock在线互动和离线上传两种模式的编程方式,以及Makecode的插件地址,这里做一个简单介绍,后续不会用篇幅额外篇幅描述
- 舞台互动
在线互动也称为硬件与电脑通过USB串口通讯,需要往Micro:bit里上传一个固化的通讯程序(也称作恢复固件
确保恢复了固件并且在②处连上了串口,只需要点击软件里的积木块就能让Micro:bit运行对应功能
- 离线上传
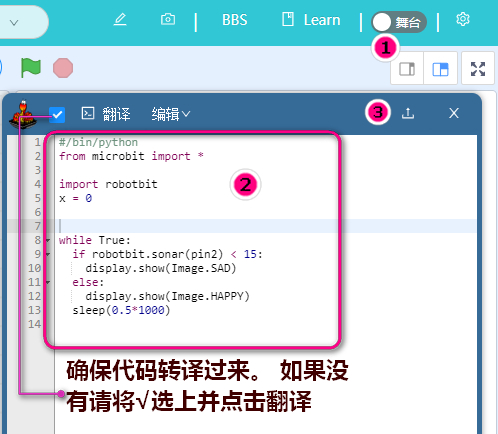
要使Micro:bit脱离电脑还能运作对应功能,需要将编写的程序上传到Micro:bit中,Kittenblock提供积木块转译代码并上传的功能(需要确保你的积木块都包含在小旗子积木块下,如左图
- Makecode插件地址:Robotbit
猫耳洞超声波
猫耳洞超声波兼容3.3V和5V,只需3根线(有别于普通4线超声波)
🔺接线:这里用microbit的P2脚作为超声波的信号脚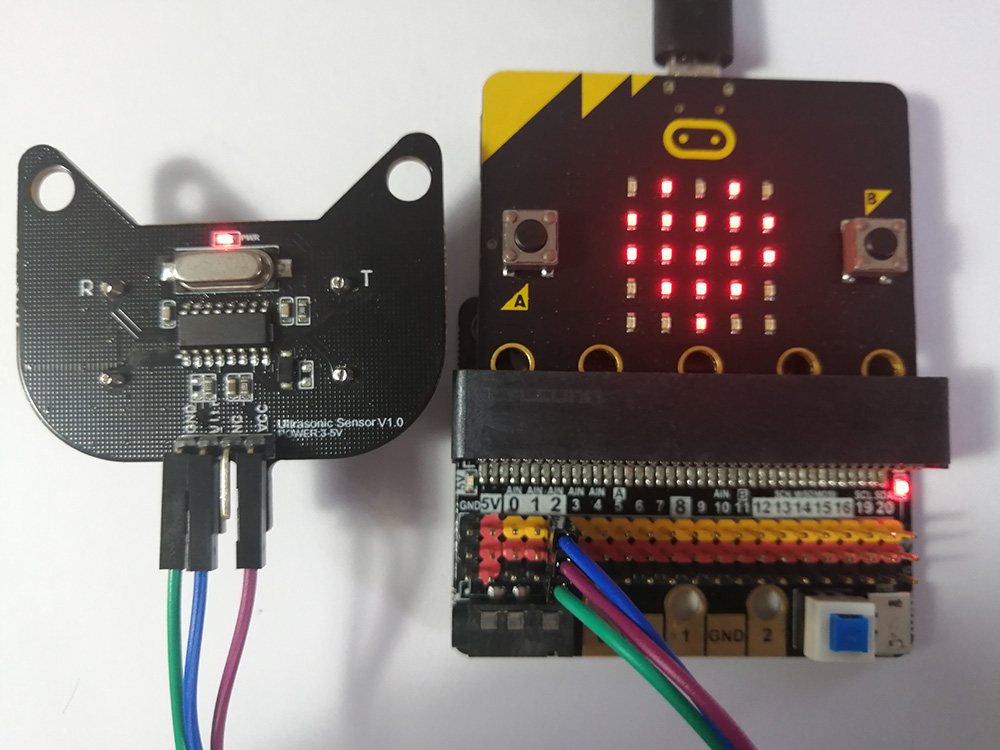
🔺Kittenblock编程:
- 在线互动
用猫头超声波控制舞台上的小猫角色大小,当超声波里障碍物较近时,小猫变小,离障碍物较远是小猫变大
- 离线上传
当检测到15cm内有物体,microbit显示表情变化
🔺Makecode编程:
当检测到15cm内有物体,microbit显示表情变化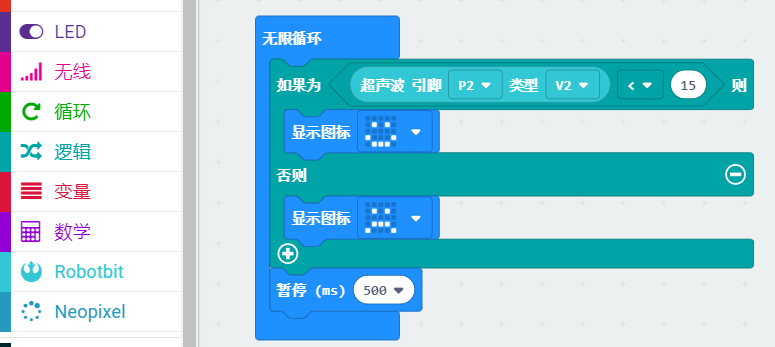
Geekservo 9g灰色舵机
Geekservo系列是喵家推出兼容乐高拼搭的执行器,灰色为舵机,可旋转角度范围在-45~225°
(20ms周期,脉宽为500~2500 us)
🔺接线:接在S1口,注意线序方向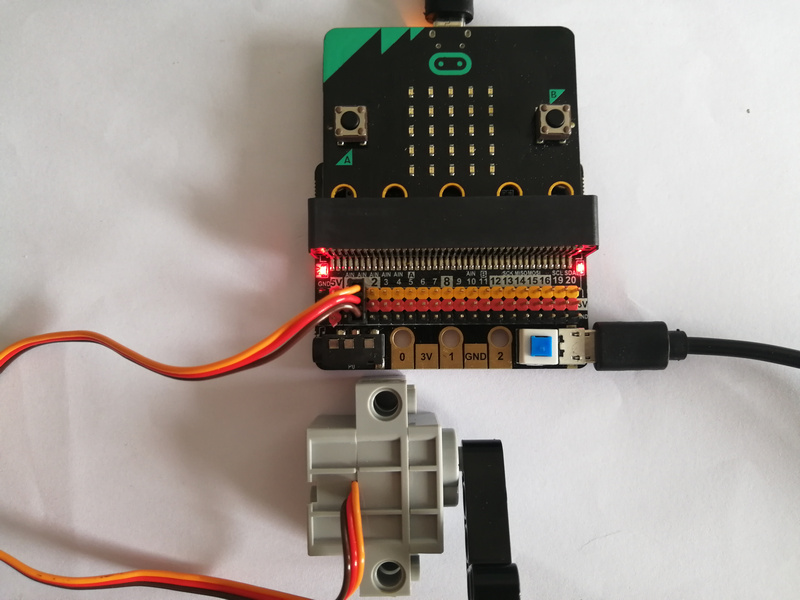
🔺Makecode编程:
每隔2s改变一次舵机的角度
橙色360舵机
这个360舵机说起来虽然叫做舵机,但由于其内部并没有限位,使其可以使用舵机的驱动方式,当做电机使用
局限是:不可作为需要灵敏反应的场景,制作一些简单的传送石合适的
🔺接线:接在S1口,注意线序方向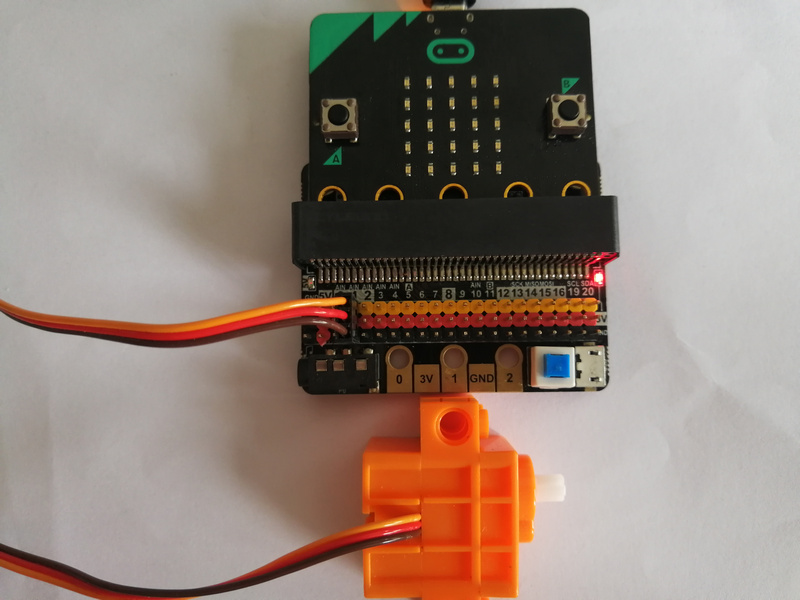
🔺Kittenblock编程:
暂时可以使用舵机积木块来驱动,实际就是舵机的中值角度对应橙色舵机的停止转动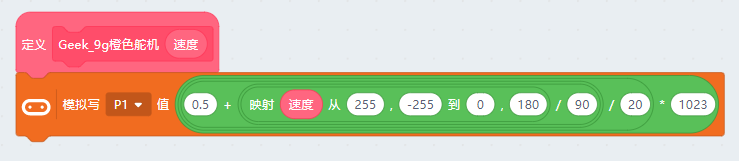

🔺Makecode编程:
每隔2s改变一次舵机的角度(左右两边的程序实际上效果是一样的)

9g蓝色舵机
普通9g蓝色小舵机转动区间在0~180°
(20ms周期,脉宽为500~2500 us)
🔺接线:接在S1口,注意线序方向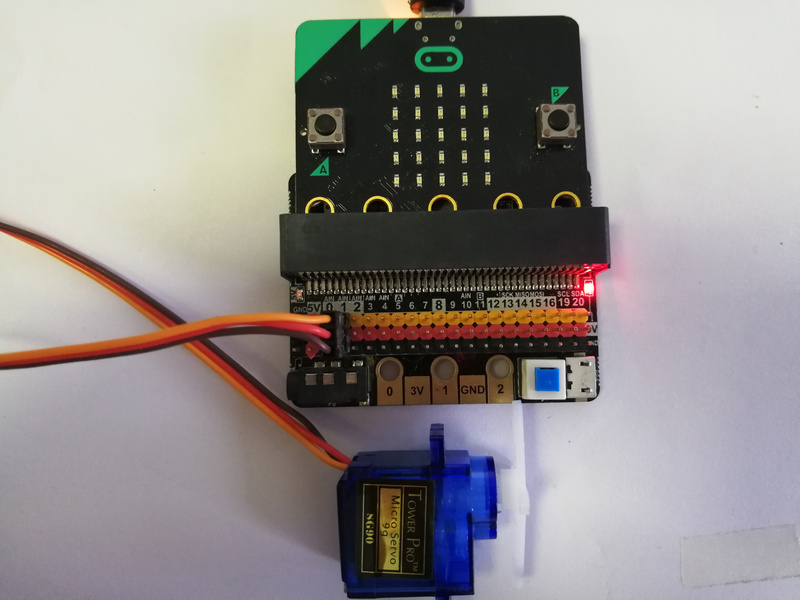
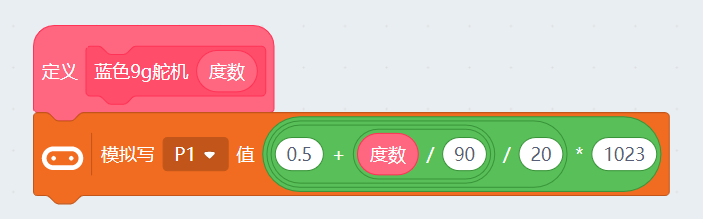
🔺Kittenblock编程:
- 离线上传
原理:
from microbit import
pin1.set_analog_period(20) #周期20ms
pin1.write_analog((0.5+90/90)/201023) #舵机转到90度
任意角度对应的PWM的值: (0.5+n(2.5-0.5)/180)/201023
n为实际需要转到的角度
0.5代表0.5ms,对应0度
2.5代表2.5ms,对应180度
20代表20ms, 对应周期
1023,对应0---1023,[0~1023]
每隔2s改变一次舵机的角度

🔺Makecode编程:
测试橙色舵机不同速度的运转

光敏传感器
光敏传感器返回值是模拟值0~1023,并且光线越亮,数值越大
🔺接线:接在Robotbit Shield的P1端口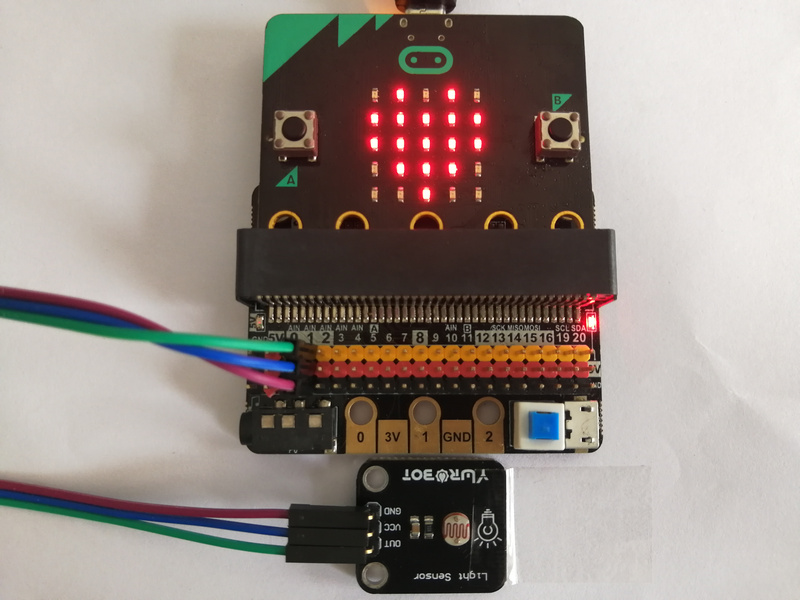
🔺Kittenblock编程:
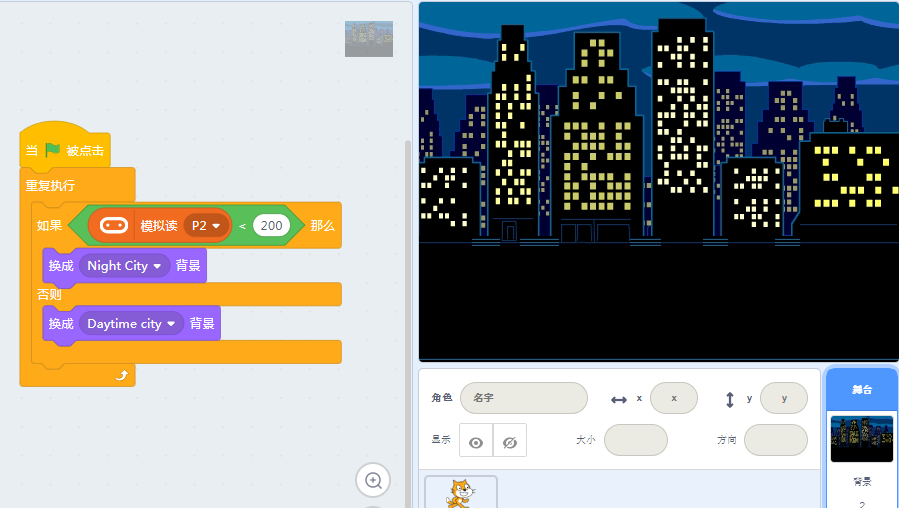
- 在线互动
用光敏模块检测到的亮度切换舞台背景,当检测到的亮度小于200时,切换到白天背景,否则为晚上背景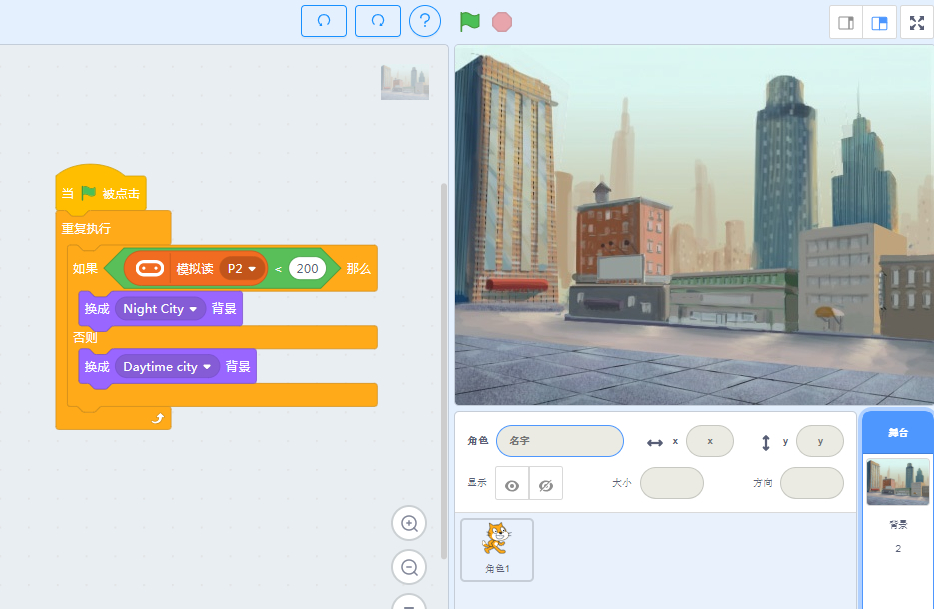
- 离线上传
Microbit点阵屏每隔1秒循环显示当前的亮度值,光敏模块检测到的亮度越亮,数值越大 
🔺Makecode编程:
Microbit点阵屏每隔1秒循环显示当前的亮度值,光敏模块检测到的亮度越亮,数值越大 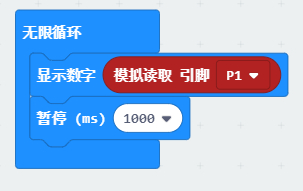
按键模块
按键是数字传感器,属于导通接地的类型,所以需要默认引脚是上拉状态
🔺接线:两个按键分别接在IObit的P1,P8口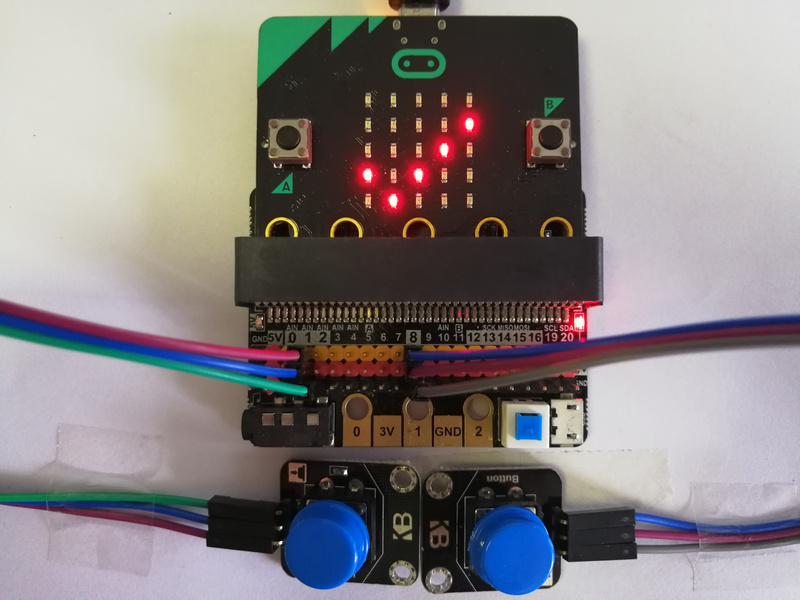
🔺Kittenblock编程:
- 在线互动
控制舞台角色移动,注意在线控制不能让指令发的太快,加个0.1s延时吧
- 离线上传
通过按键来控制microbit显示的表情吧(这里的0.1s是为了给按键去抖,否则一次按下可能触发多次)
🔺Makecode编程:
注意引脚上拉积木块位于引脚分栏的 更多 里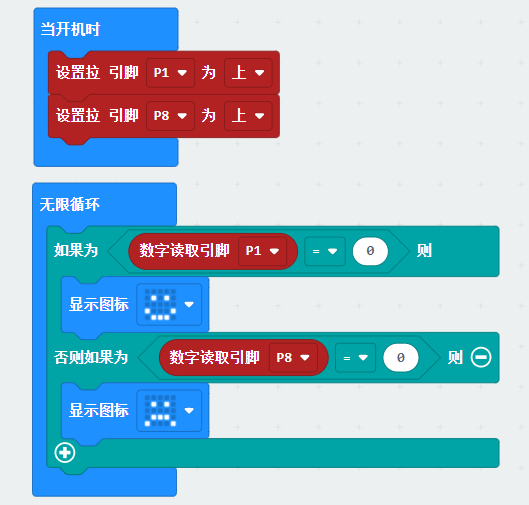
红绿灯模块
红绿灯模块实际上是3颗共阴的发光二极管,他们的一侧都是接在GND上的,故信号脚则需要高电平导通
🔺接线:接在Robotbit Shield的P1端口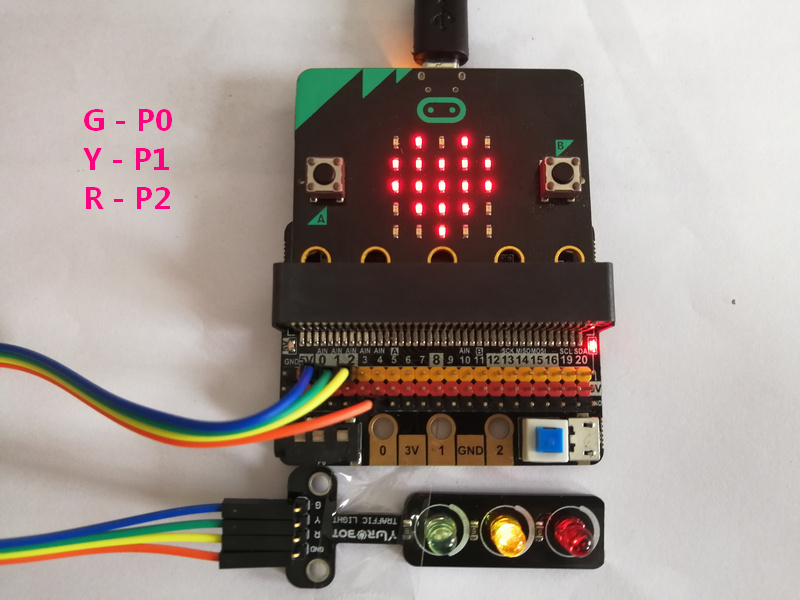
使用P0引脚时,需要将IObit上的蜂鸣器拨码开关拨向蜂鸣器关闭的一侧,否则在数字输出时会有咔咔声
🔺Kittenblock编程:
模拟简单的红绿灯切换效果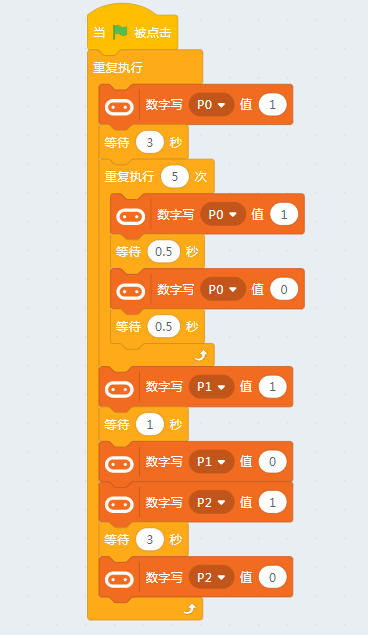
🔺Makecode编程:
模拟简单的红绿灯切换效果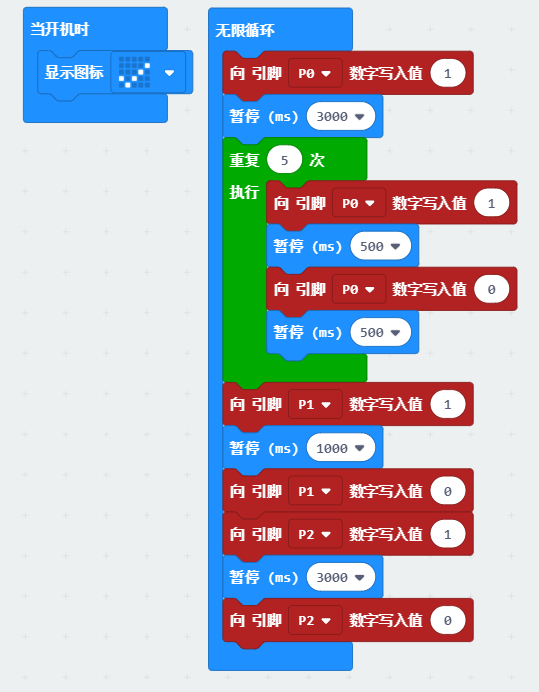
旋转电位器
旋转电位器返回值是模拟值0~1023,原理是通过旋转调整电阻,进而改变电压
🔺接线:接在Robotbit Shield的P1端口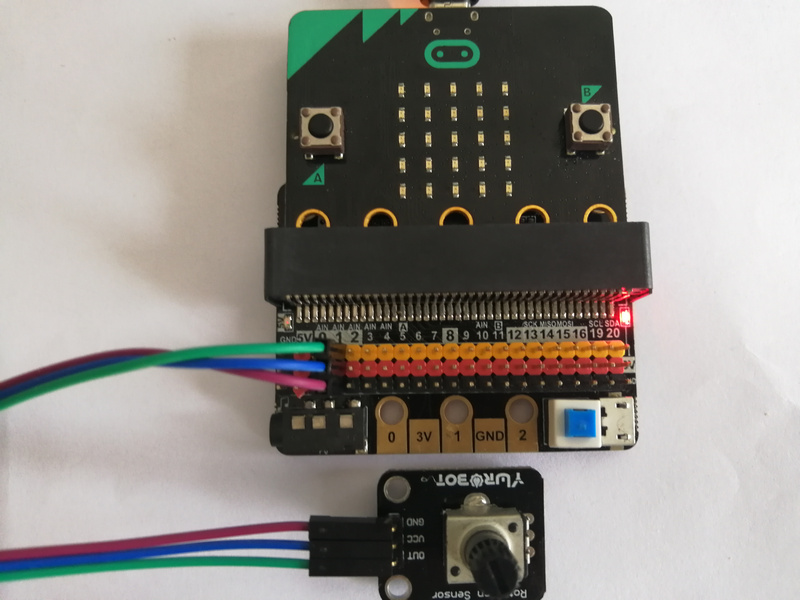
🔺Kittenblock编程:
- 在线互动

- 离线上传
Microbit点阵屏每隔1秒循环显示当前的模拟值,通过旋钮调整
🔺Makecode编程:
Microbit点阵屏每隔1秒循环显示当前的模拟值,通过旋钮调整
火焰传感器
火焰传感器检测波长760-1100nm,检测距离30-800mm,探测角度约60°,输出模拟量电压,对普通光有反应,但对火焰最敏感
🔺接线:接在Robotbit Shield的P1端口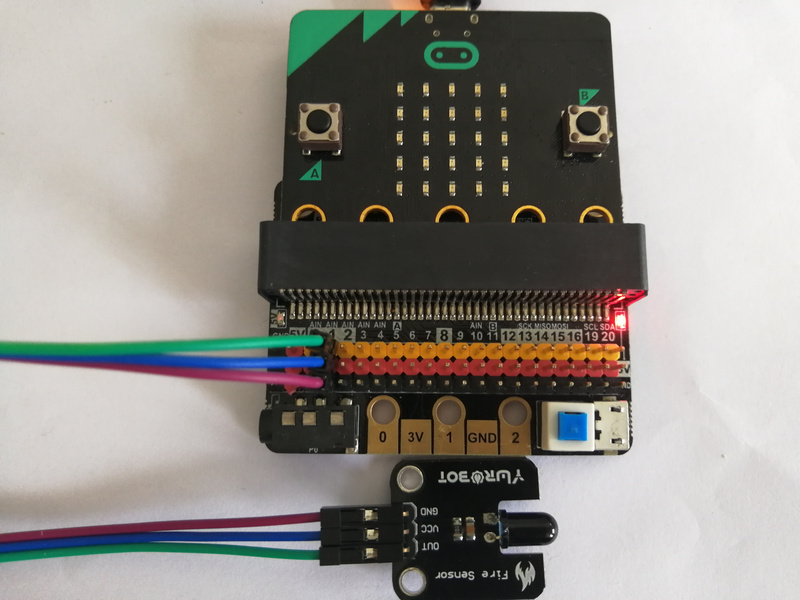
🔺Kittenblock编程:
- 在线互动
小猫说出当前检测数值,探测到火焰的时候数值最大
- 离线上传
Microbit点阵屏每隔1秒循环显示当前的模拟值,检测到火焰的时候数值最大
🔺Makecode编程:
Microbit点阵屏每隔1秒循环显示当前的模拟值,检测到火焰的时候数值最大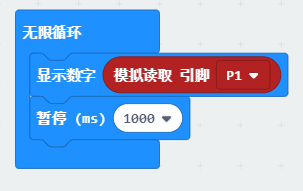
土壤湿度传感器
土壤湿度传感器用于插入土壤中检测水分含量,原理为利用电阻变化测量水分湿度,土壤越干燥,输出电压越小。越湿润输出电压越大。常用于结合水泵进行自动浇花系统
🔺接线:接在Robotbit Shield的P1端口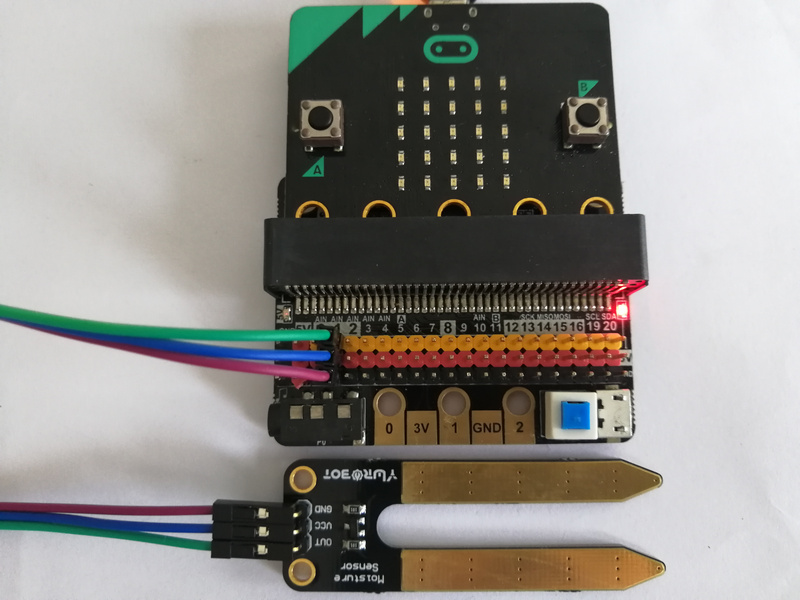
🔺Kittenblock编程:
- 在线互动
实现土壤传感器检测当前的土壤湿度值,如果土壤湿度小于50,则切换到Savanna背景,否则切换到Arctic背景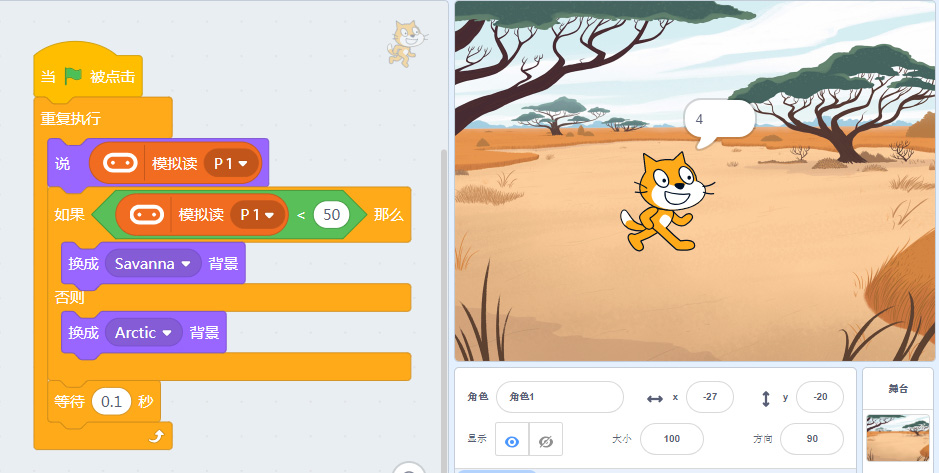
- 离线上传
Microbit点阵屏每隔1秒循环显示当前的土壤湿度值,检测到的土壤越湿,数值越大 
🔺Makecode编程:
Microbit点阵屏每隔1秒循环显示当前的土壤湿度值,检测到的土壤越湿,数值越大
食人鱼LED
白光LED,高亮
🔺接线:接在Robotbit Shield的P1端口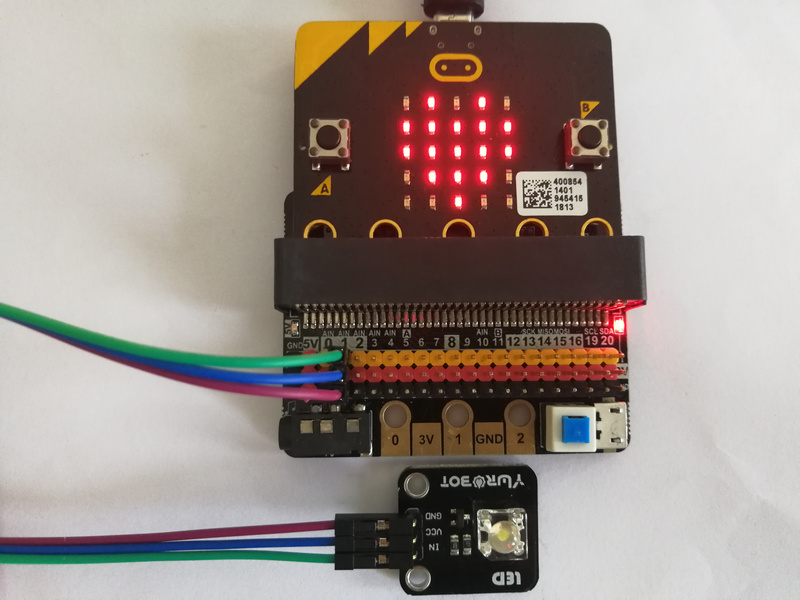
🔺Kittenblock编程:
简单控制亮与灭
🔺Makecode编程:
实际上可以通过控制pwm来调光,制作呼吸灯等效果