12-垃圾分类图像识别
项目简介
垃圾分类是一种环保行动,通过将垃圾分为不同的类别,可以更有效地回收和处理垃圾,减少对环境的污染。
今天带大家制作一个有意思的相关创意,使用小喵的人工智能模块KOI进行图形识别垃圾分类。
制作&运行-流程
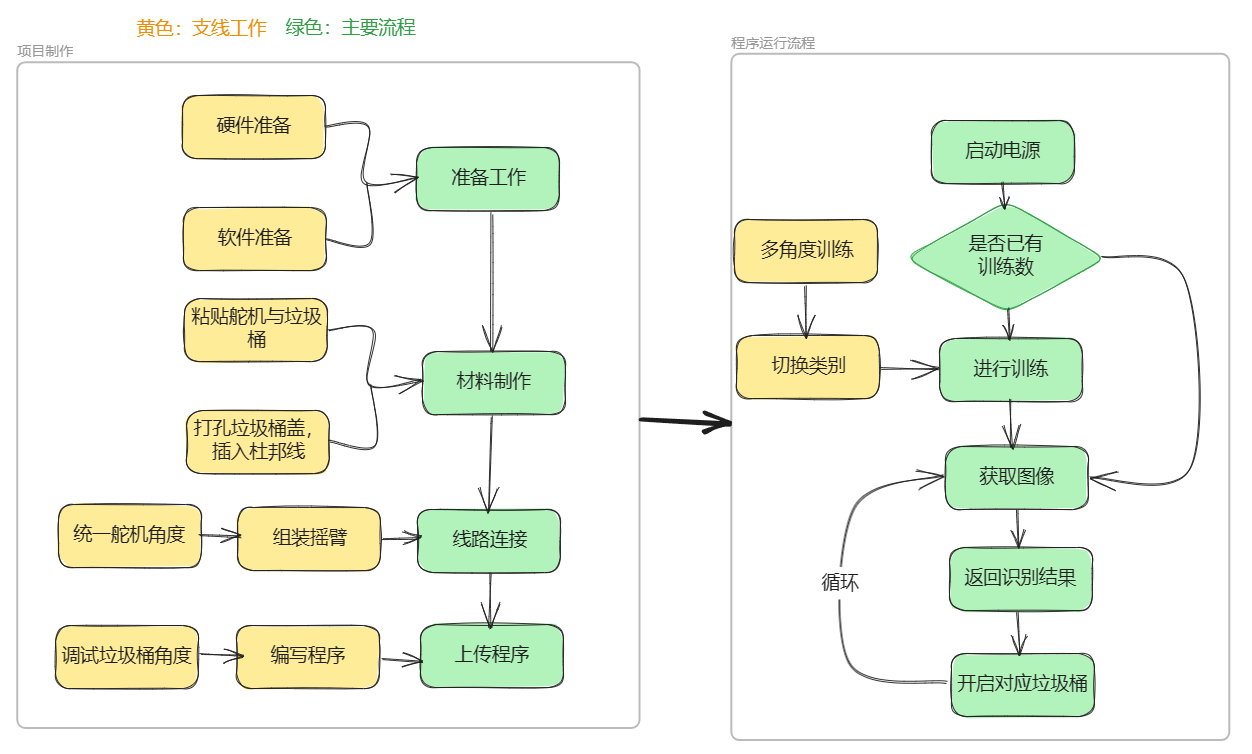
项目制作
项目准备
- 软件方面
- 材料或硬件 | 材料 | 备注 | | --- | --- | | 人工智能模块KOI | x1 | | 未来板 | x1 | | robotbit | x1 | | 18650锂电池 | x1 | | Type-C数据线 | x1 | | 基础垃圾分类套件 | 包含各类型垃圾桶,和各类型垃圾卡纸 | | 胶水或胶带 | 用于固定 | | 杜邦线 | 硬件连接和控制垃圾桶盖 |
材料制作
- 给垃圾桶后盖打一个小孔,可以刚好卡住杜邦线头,之后用胶水固定一下
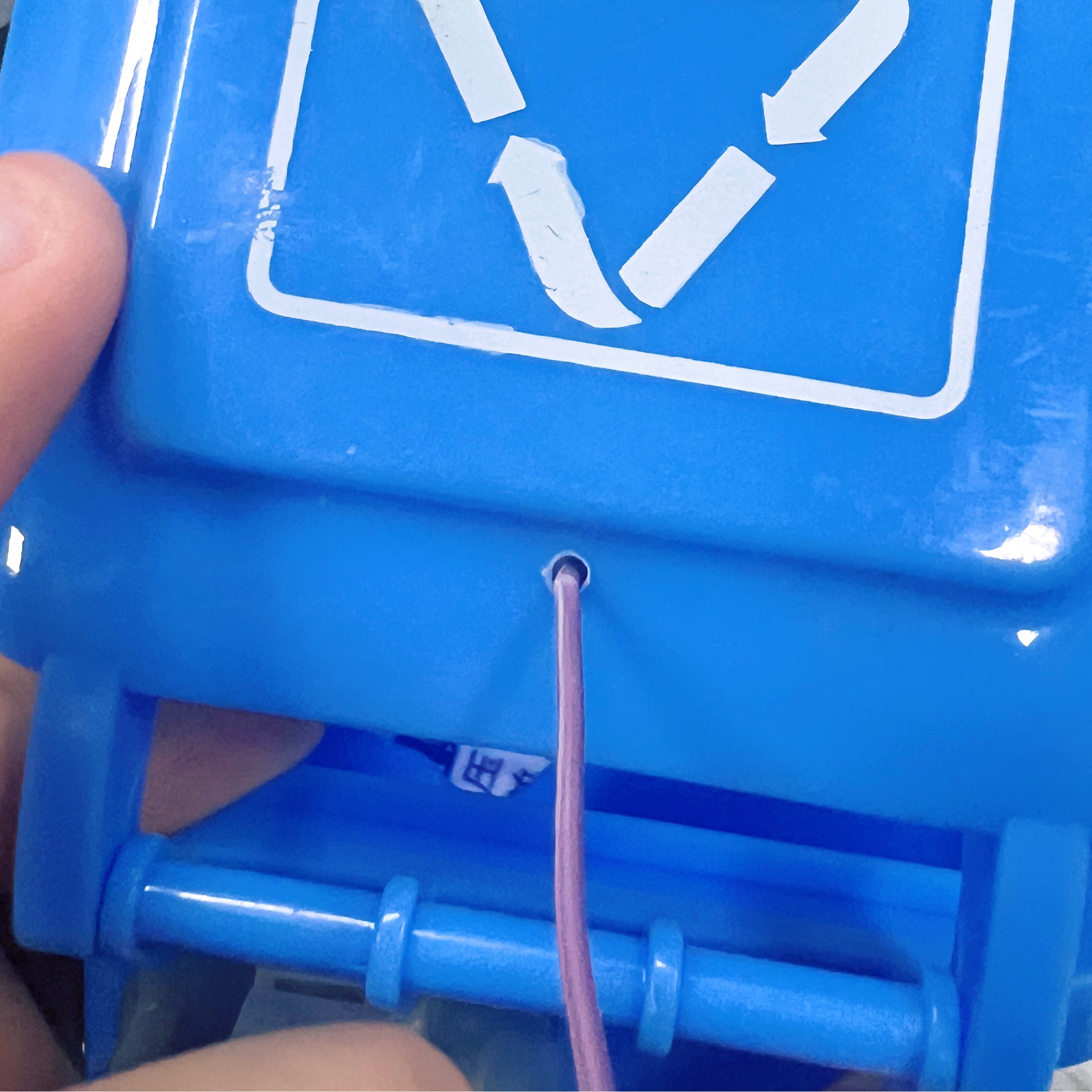

- 杜邦线的另外一头捆住转接积木件

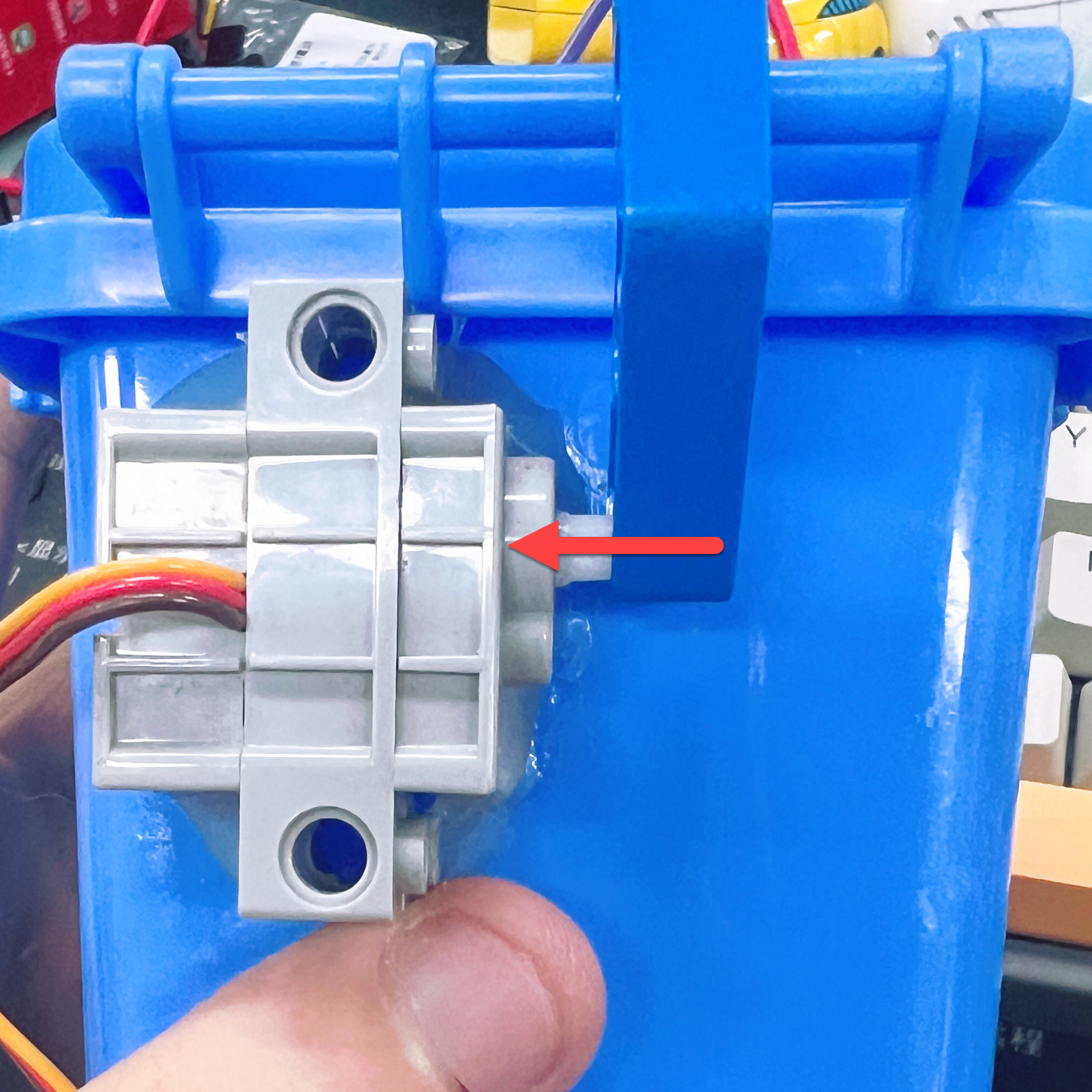
- 使用胶水或胶带将舵机固定到垃圾桶背后

线路连接
首先将未来板插入robotbit
参考下图连接线路
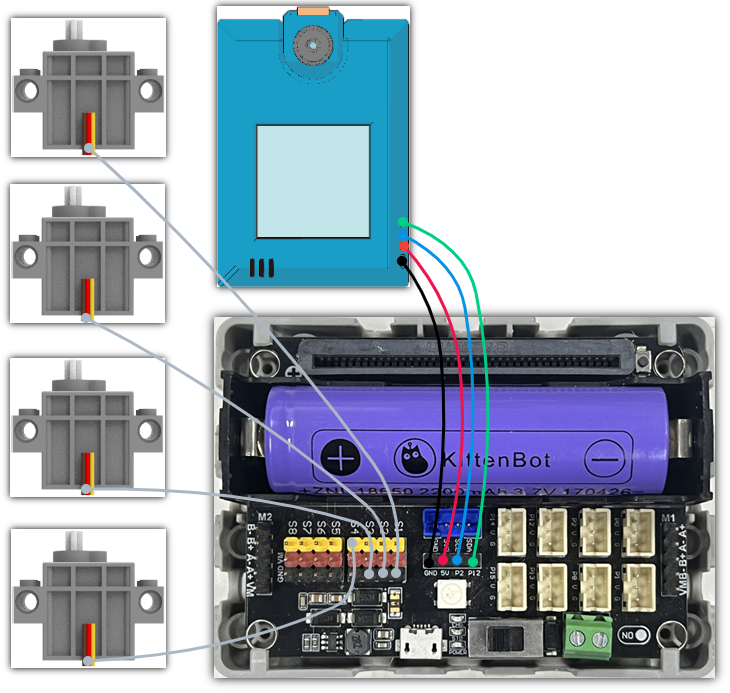
注:舵机的插入的线序应该和插座的颜色一致,图示为显简洁没有具体标注三跟线。
舵机的实际极限应该参考下图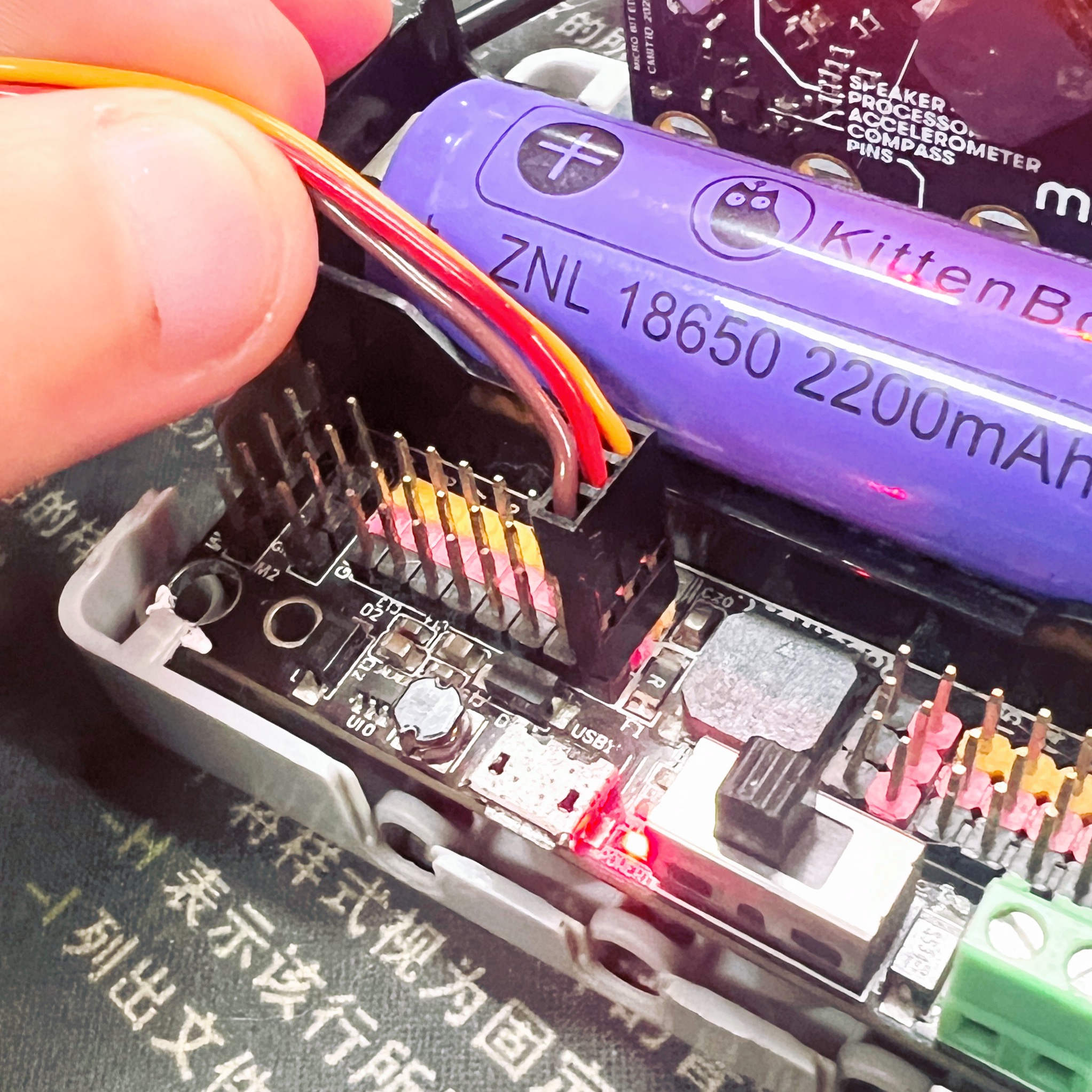
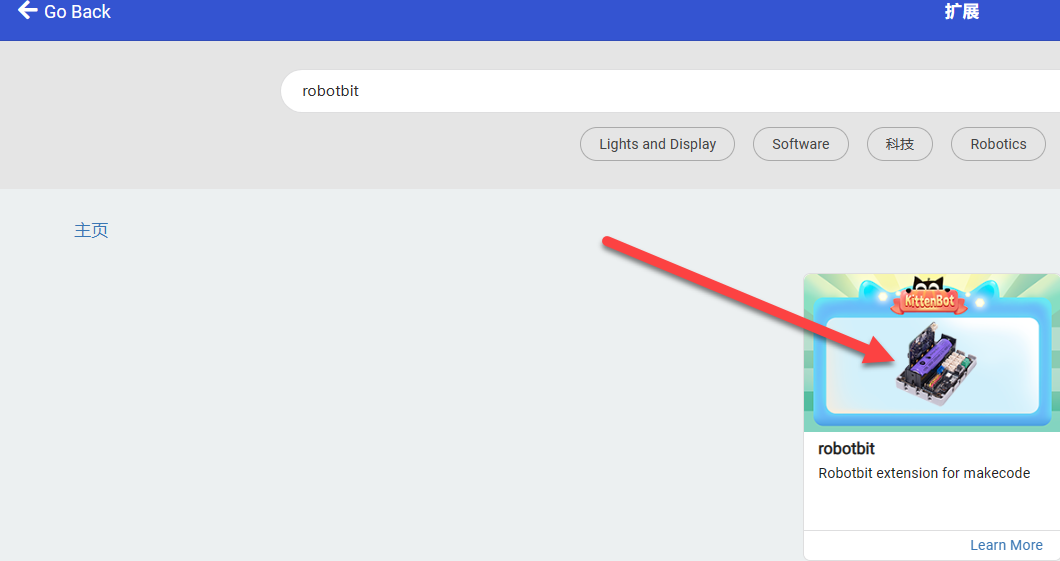
在线路连接完毕之后,需要统一所有舵机的角度。在makecode中添加robotbit扩展,然后编写以下程序上传

在上一步统一舵机角度之后。我们将舵机与摇臂连接
编写程序
https://makecode.microbit.org/_63TVCr1C7CL4
作品链接已分享,可以直接通过上面的连接编辑调试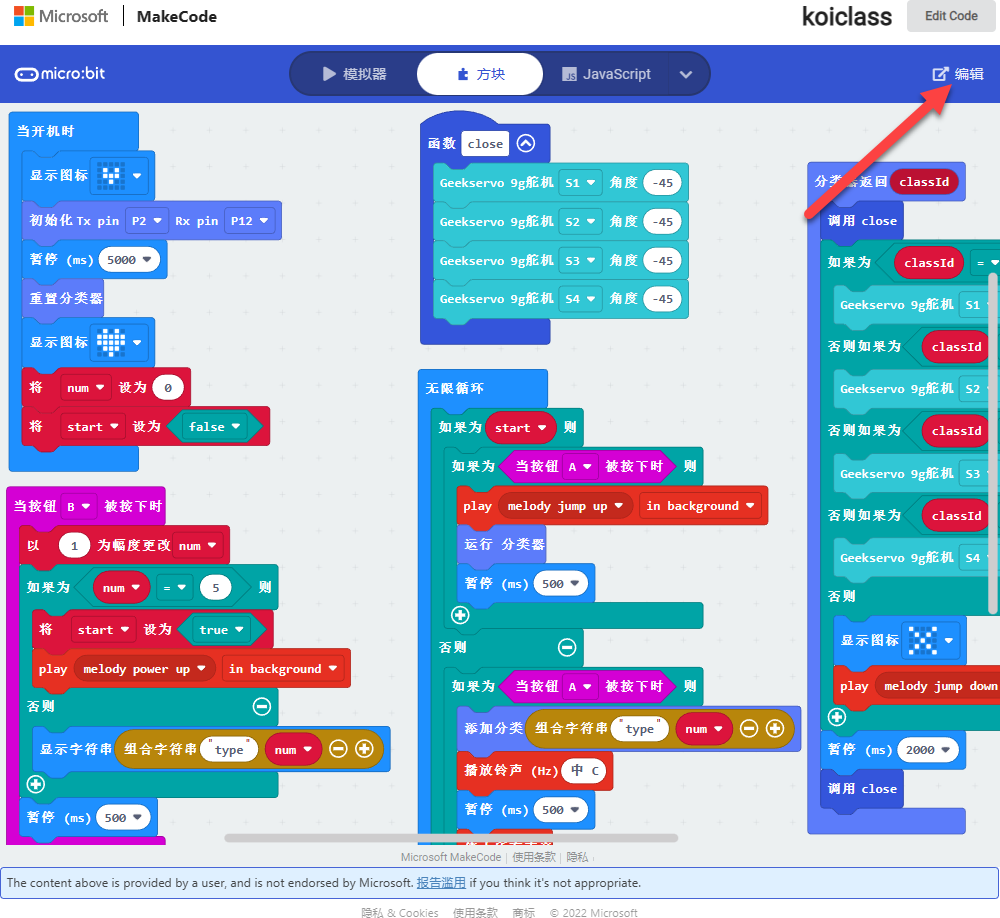
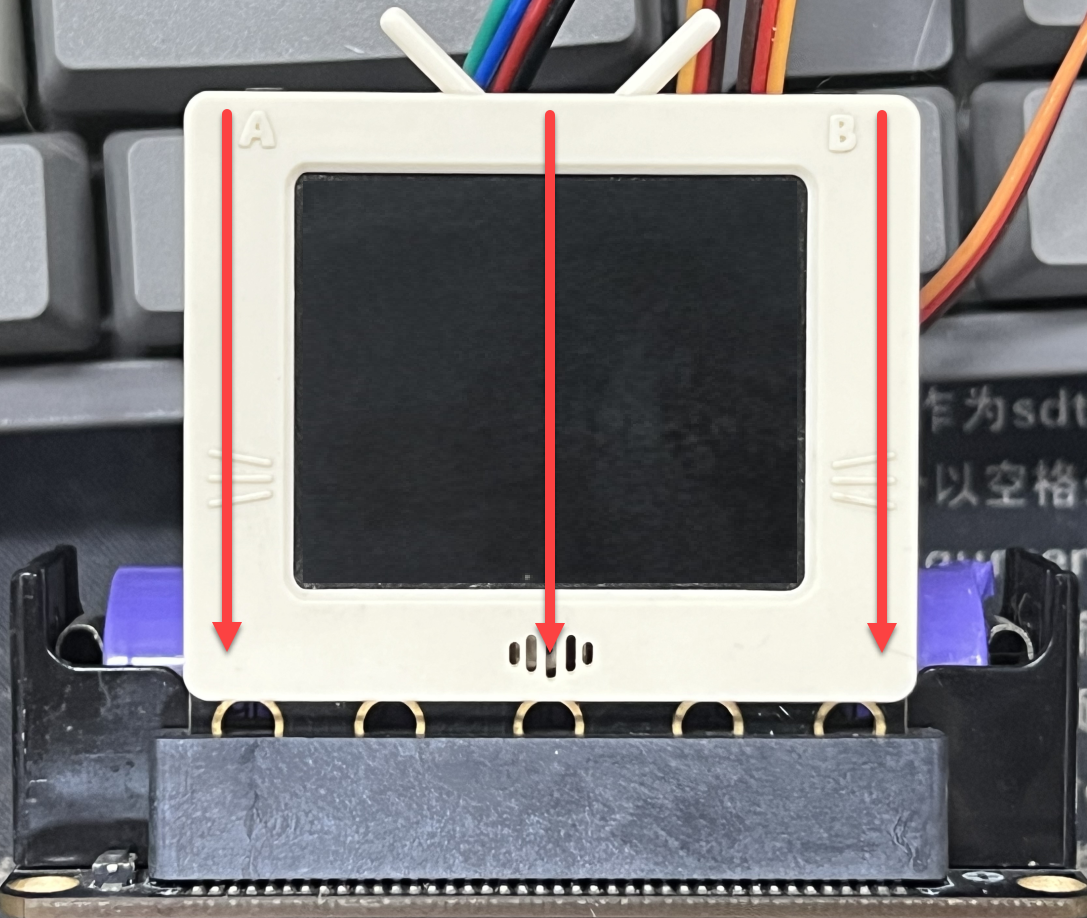
效果实现
- 程序下载完毕之后,断开数据线,开启robotbit电源

- 将同一类的垃圾卡片,逐个放在koi镜头下,按住microbit A键进行训练

- 当同一类的垃圾训练完毕时,比如厨余垃圾训练完毕,此时按下microbit B键切换分类,然后在放入下一类垃圾继续按A进行训练
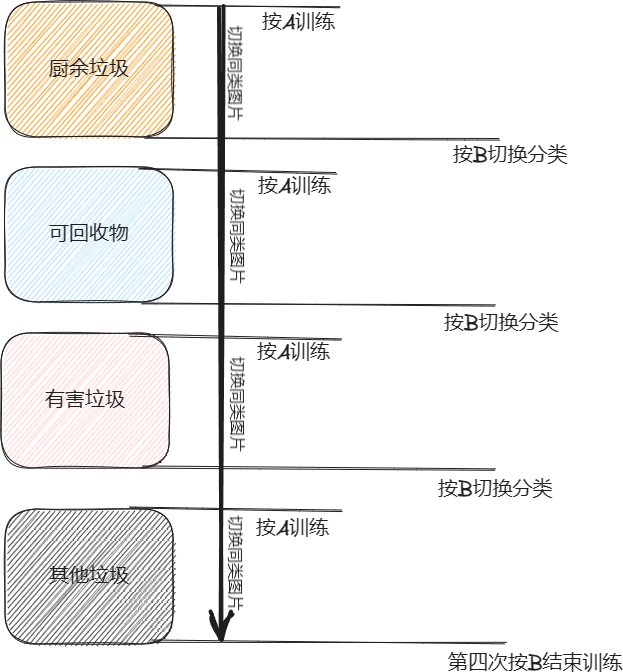
- 如上示意图所示,当你第四次按下b键位是表示训练结束,接下来程序就会开启识别模式,将卡片放在摄像头下,然后按下microbit A键,对应的垃圾桶盖就会打开,可以多换几个张卡片试试。

- 如果第四步骤正确的打开了垃圾桶,那么恭喜你,大功告成了。
反之则有可能是其他分类有相似的图片,在下次训练的时候可以对该图片进行变换角度多次训练。