避障功能
避障采用的是超声波,检测距离大致在3~200cm间合适,请跟随下面的操作流程完成整个功能实现
前期准备
购买了套件后,根据套件内的组装说明书装配好整体车架结构
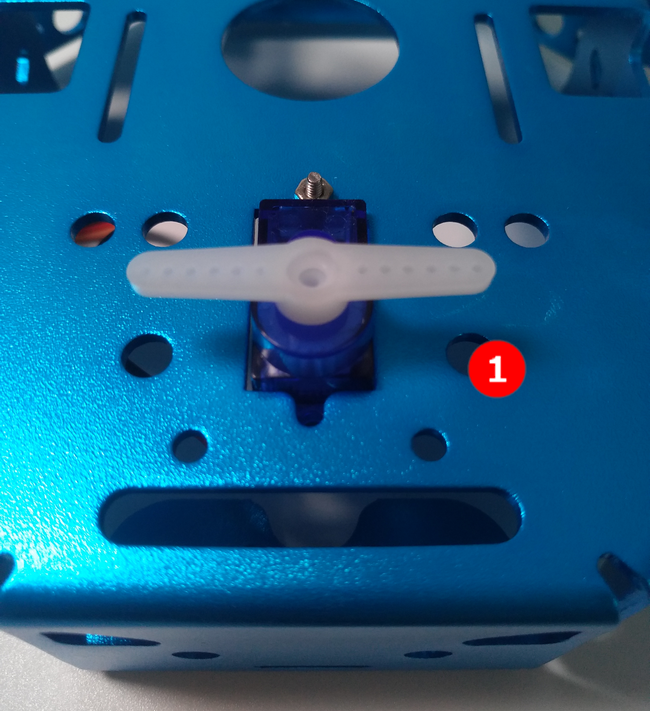
舵机的摇臂安装
首先我们装上摇臂,将它左右轻轻的扭动,可以发现两边都存在一个极限角度(即卡住不能再扭),这两个极限就是舵机的0°和180°,那么为了让舵机转动的时候能够左右平衡,我们需要让摇臂俯视水平的时候为90°
车轮的安装
安装车轮的时候采用的是轮子和tt电机的输出轴卡位的方式,但这样容易压得过紧,导致轮子的轮皮和金属底盘摩擦力过大,导致电机明明在驱动,但是轮子硬是转不动。所以装轮子时别太紧贴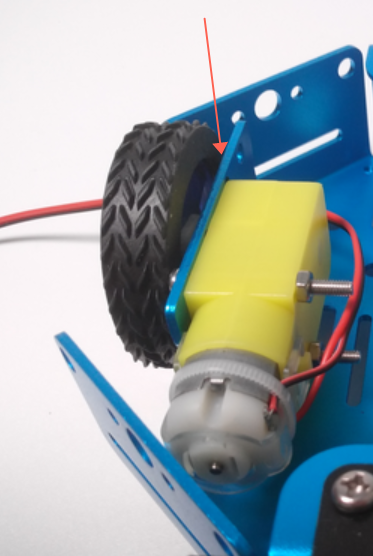
硬件连接
注意接线,舵机接在S8,图中电机为俯视小车所对应的位置。不要搞混了超声波和RGB灯的接线引脚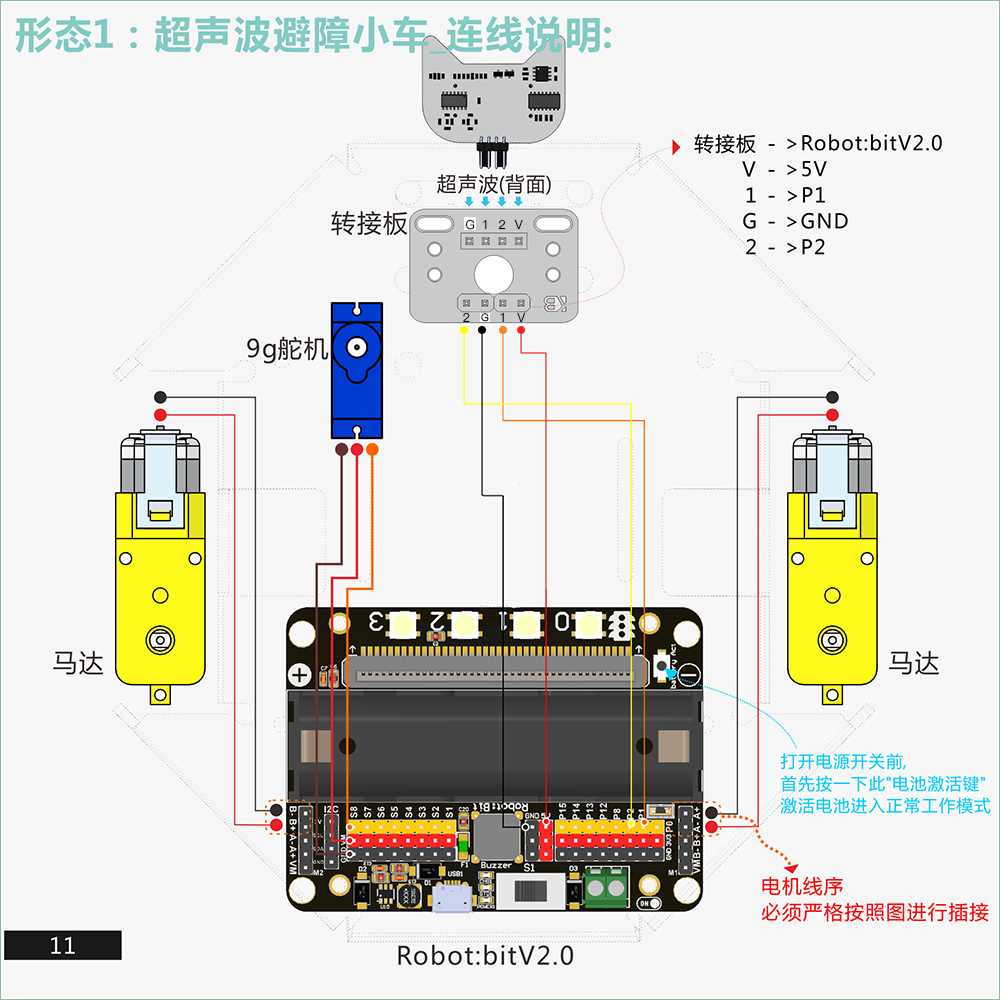
程序实现
这里提供两个常用平台的编程方法:Makecode、Kittenblock
### Makecode
- 初始化超声波RGB灯,接在P2脚

- 循环程序,检测到前方15cm内有障碍物,rgb红灯并右转。否则前进并亮绿灯

:::info 程序文件:
内包含复杂版程序,下面是程序效果 ::: 3. 最终复杂版程序效果
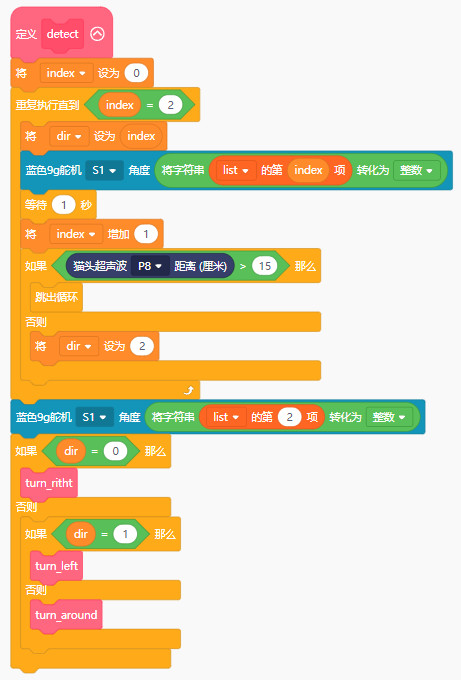
Kittenblock
在kittenblock中我们实现基础的避障程序,当前方遇到障碍物时,超声波传感器向左旋转探测左方是否有障碍物,无障碍物的情况下向小车左旋转;有障碍物的情况下,超声波传感器向右旋转探测右方是否有障碍物,无障碍物的情况下小车向右旋转 ;当前左右三个方向都有障碍物时原路返回