遥控手柄指南
硬件连接
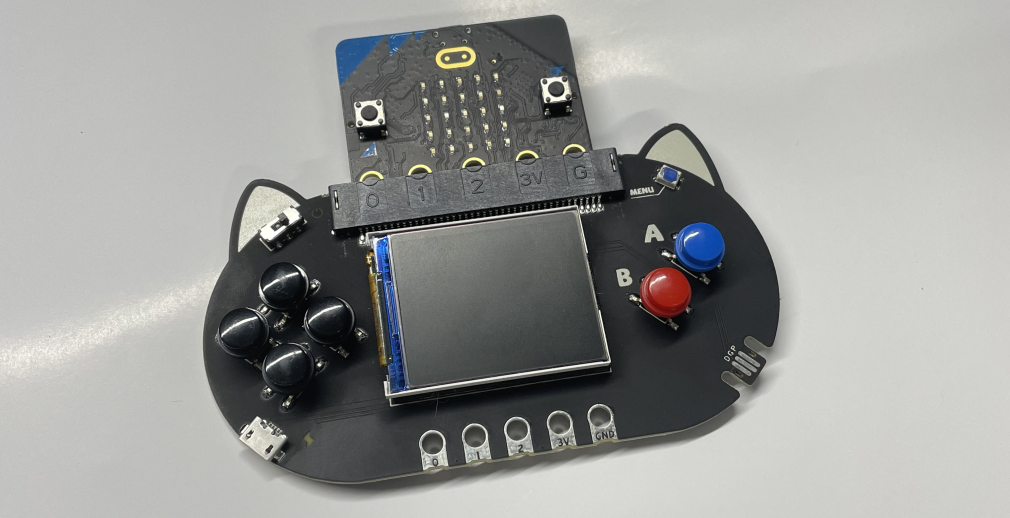
MicrobitV2与扩展板结合,microUSB接在MicrobitV2上。
- 此时如果电源从MicrobitV2端供给,扩展板的电源开关无论开关都会导通。
- 扩展板电源开关将控制的是从扩展板端供电的情况。

编程平台
Newbit Arcade Shield作为Microbit的遥控手柄依然在Arcade中编程,编程平台地址:
https://arcade.makecode.com
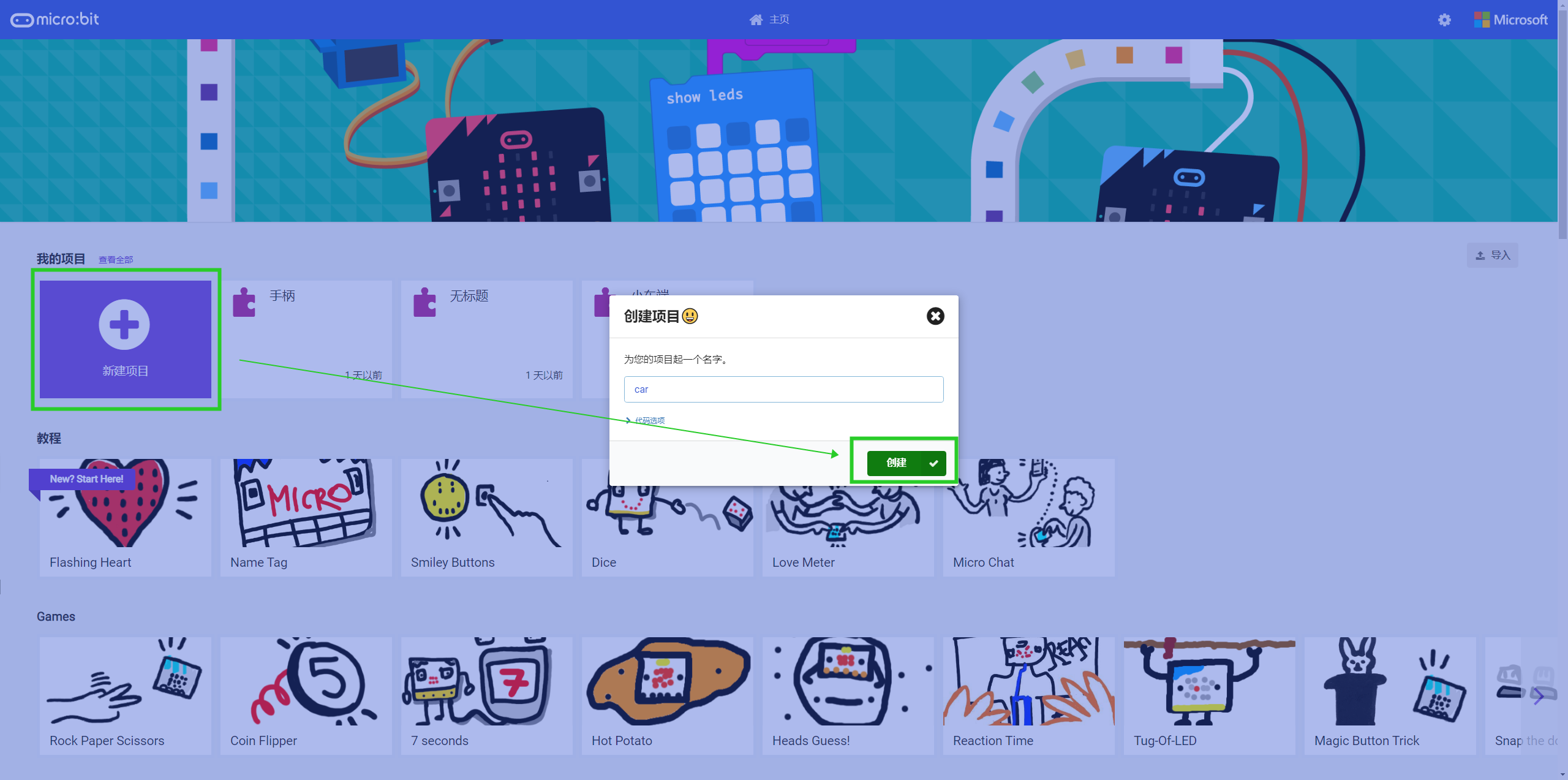
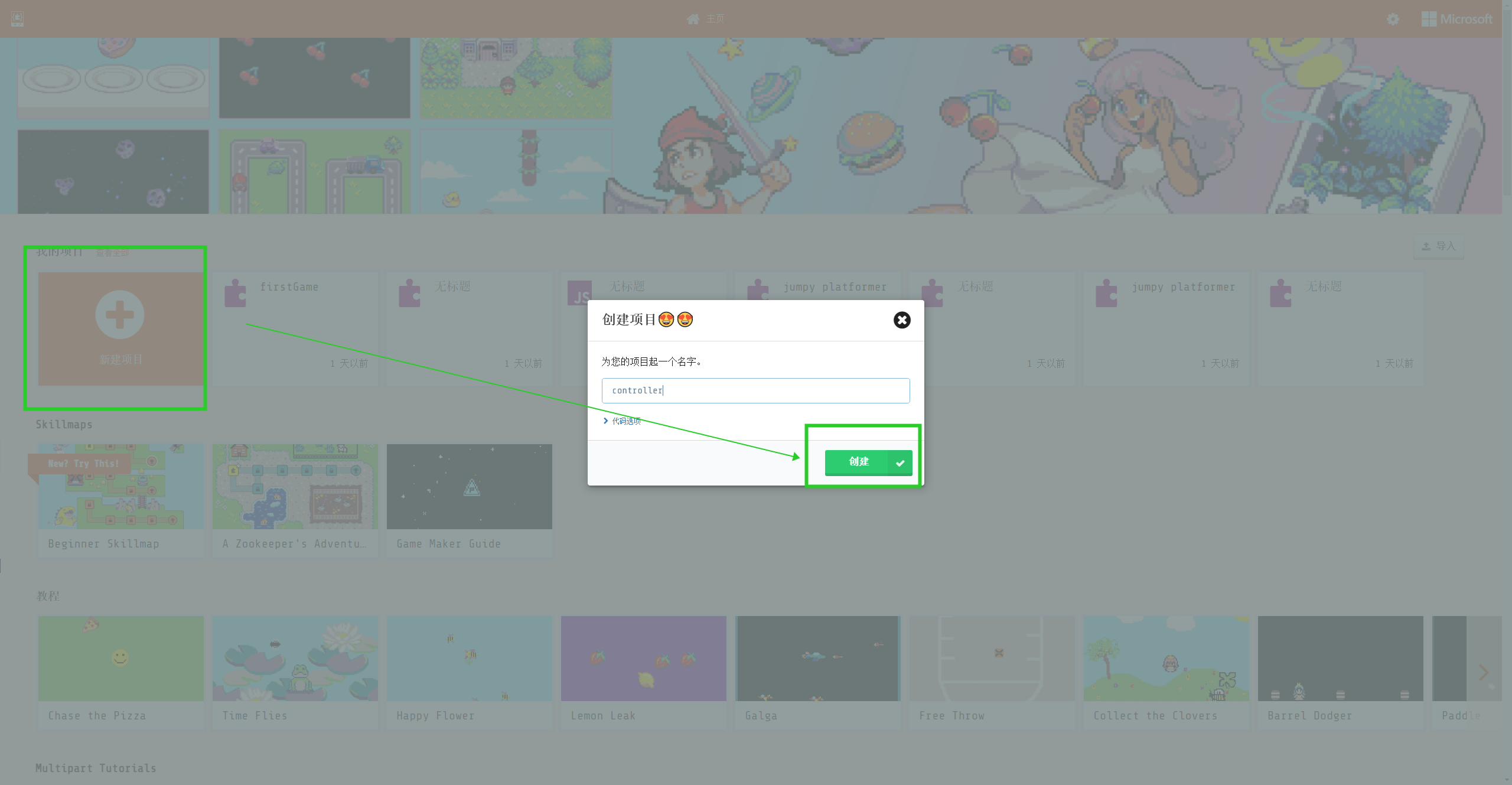
编程的首页界面
编程页面与Makecode平台非常类似,这里直接选择新建项目进入编程页面。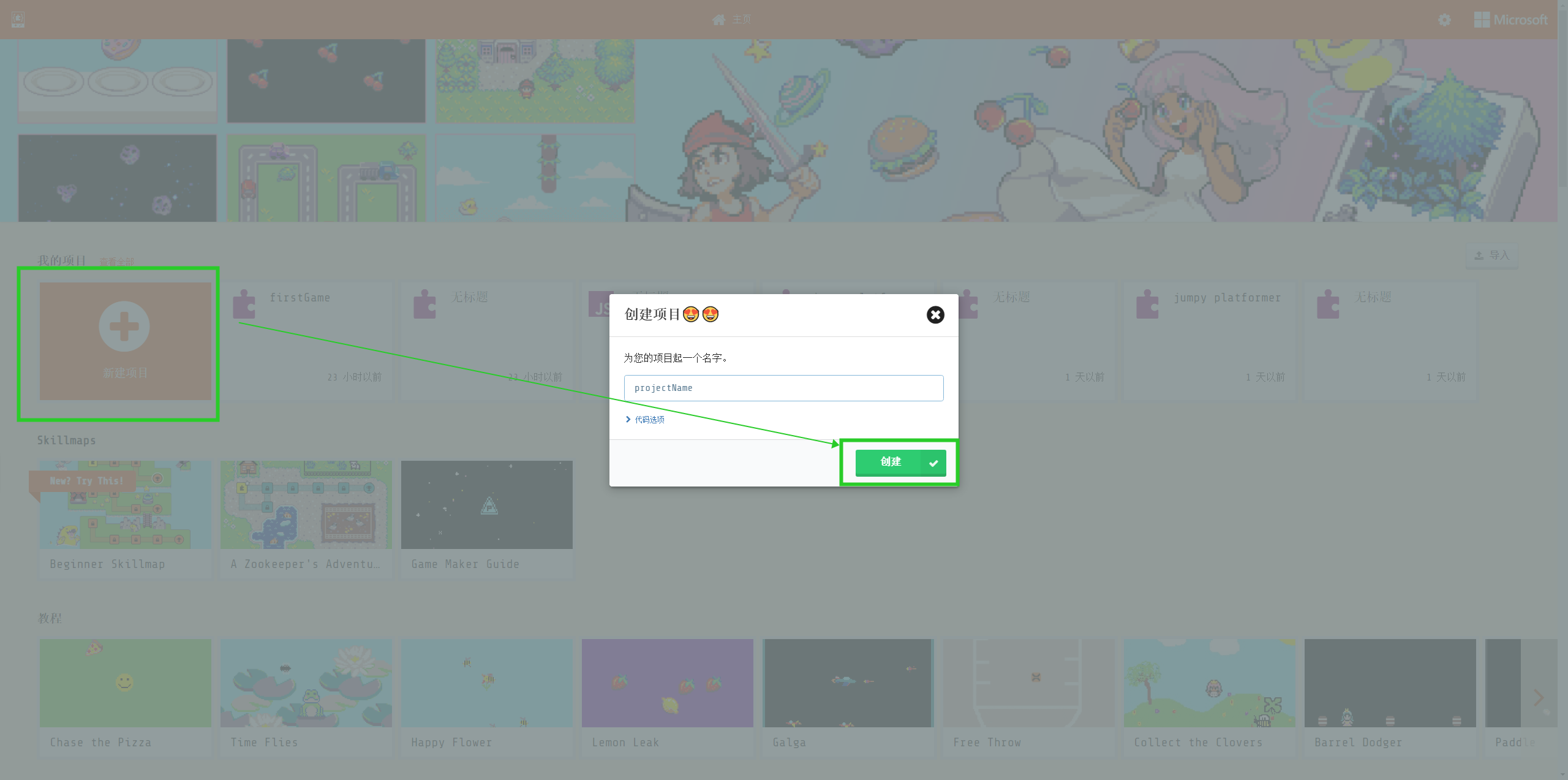
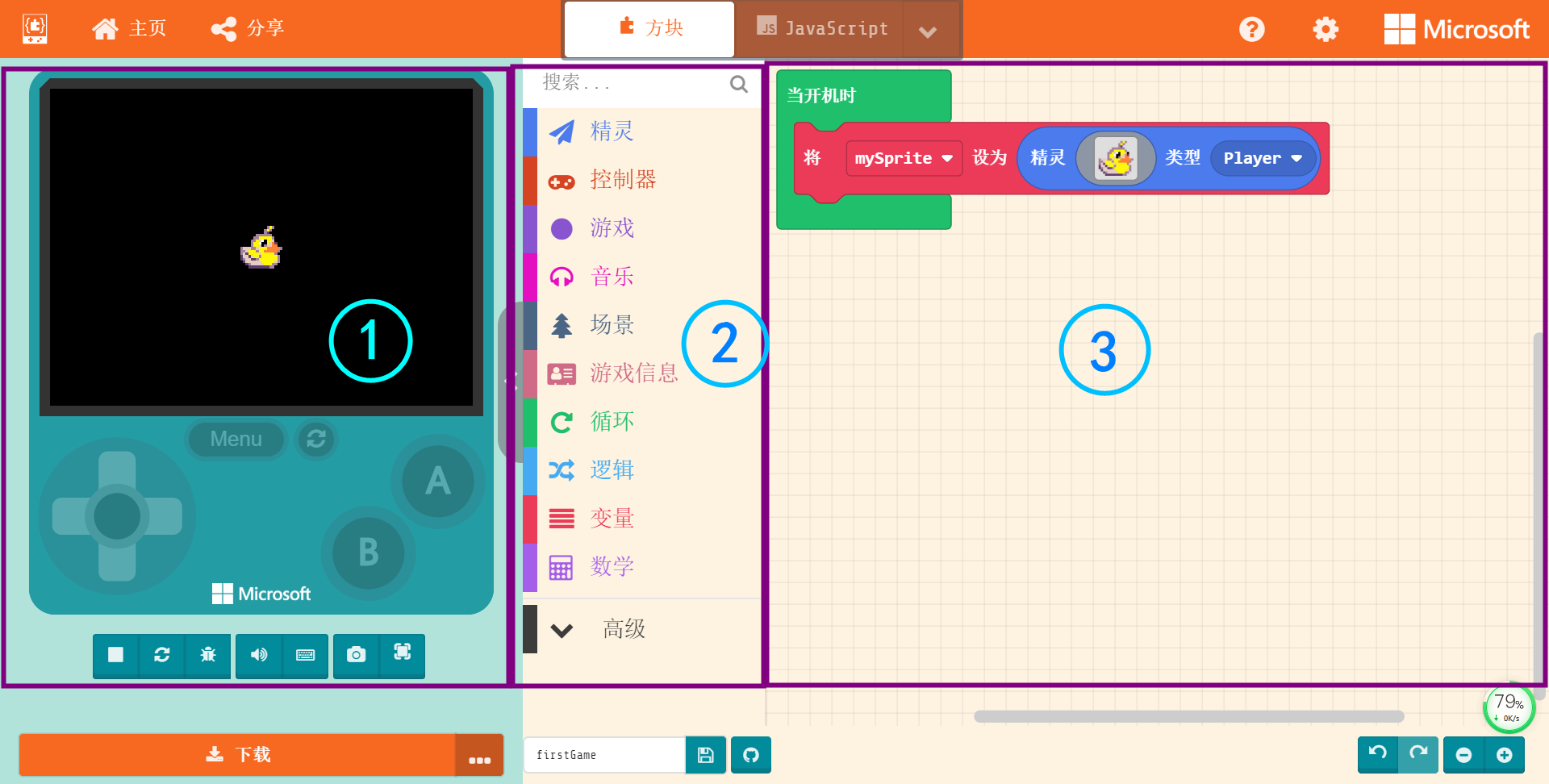
编程界面介绍,对于基础入门来说大致先分为3部分需要了解
- 在线模拟器:遥控需要实现的硬件交互内容无法不需要使用模拟器
- 编程积木栏:我们从这里拖入编程代码进行编程
- 代码编辑区:我们将代码从积木栏拖出后在这里拼接,完成程序
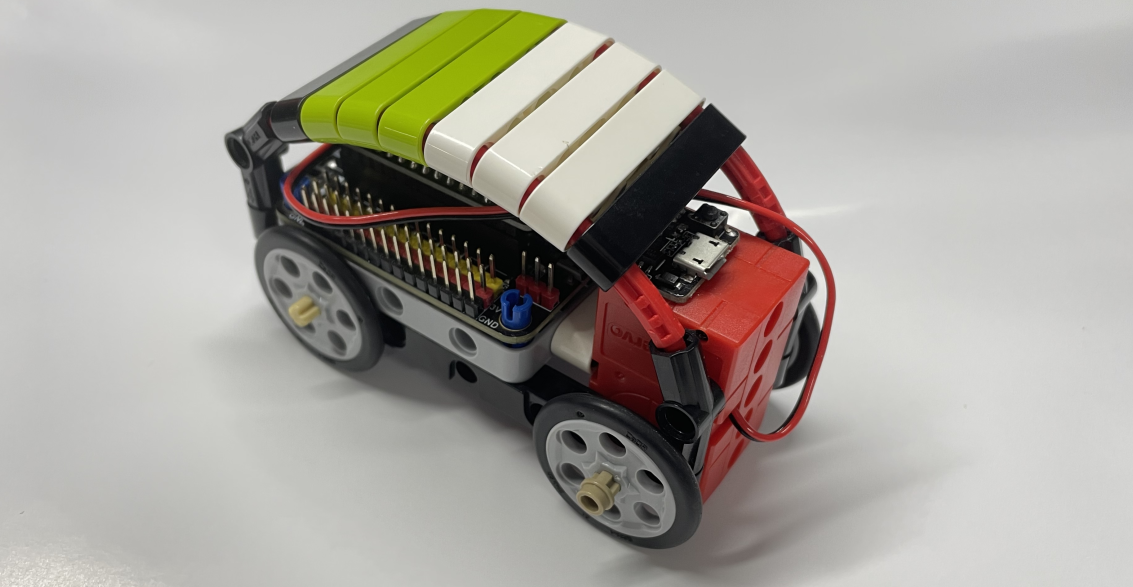
遥控小车
效果展示
这次的遥控主要是一个示范作用,所以选用的遥控对象为一个单电机小车,本次遥控所实现的效果为手柄端控制小车前后移动。手柄端在Arcade中编程;小车端在Makecode中编程

材料准备
本次案例需要用到以下材料:
- MicrobitV2 *1
- Newbit Arcade Shield *1
- Nanobit *1 (等同于Microbit)
- Nanobit Shield *1(等同于Robotbit扩展板)
- GeekServo 2KG电机 *1(其他亦可)
- 积木件若干
小车端编程
如果使用Microbit+Robotbit制作小车的同学,可以加载Robotbit插件(插件栏搜索:Robotbit)
编程平台
- 前往 https://makecode.microbit.org/
- 新建项目进入编程主页
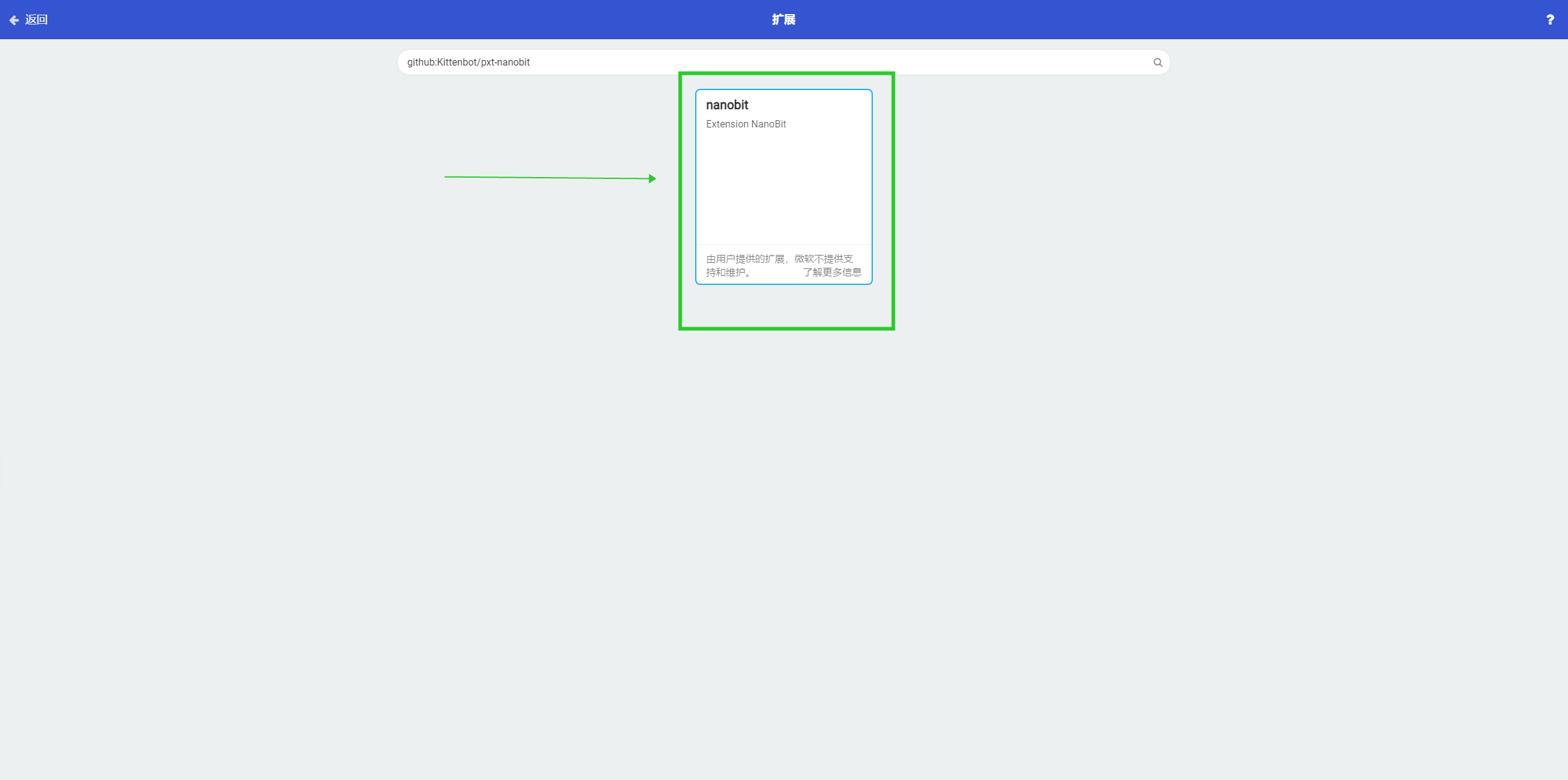
加载插件
由于本项目使用小车端主控为Nanobit,故扩展板需要配套Nanobit Shield,所以我将使用对应的makecode插件。(Microbit用户可以自行更换成Robotbit插件)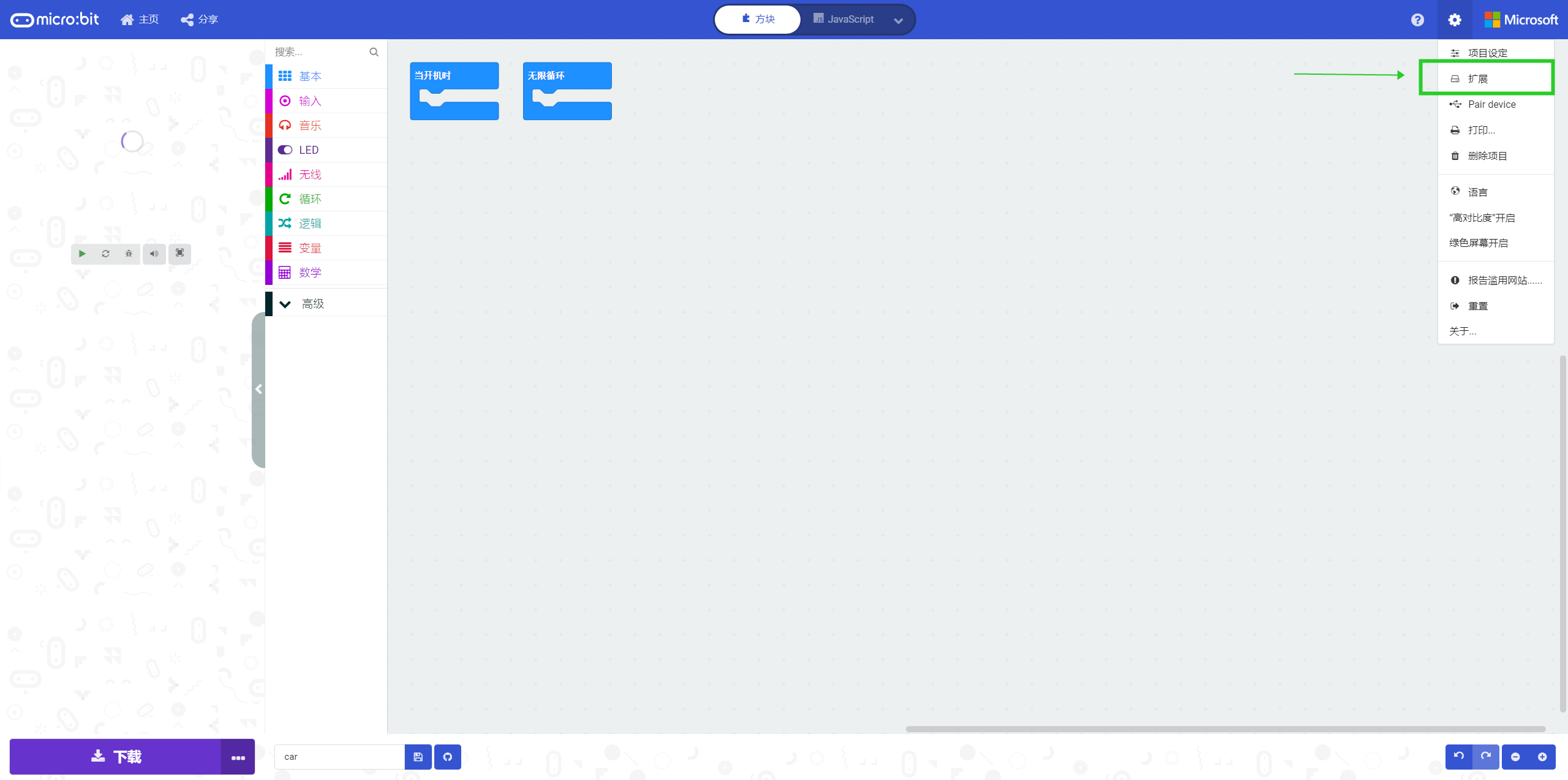
编写程序
首先分析遥控小车,小车端需要做的事情如下
- 接收遥控信号(与手柄需要在同一个无线组)
- 驱动电机行驶(判断手柄发过来的型号键值对,对应驱动电机的前与后)
下载程序
确保使用MicroUSB数据线连接主控板后,将下载得到的.hex程序文件拖入到名为Nanobit(MICROBIT)盘符。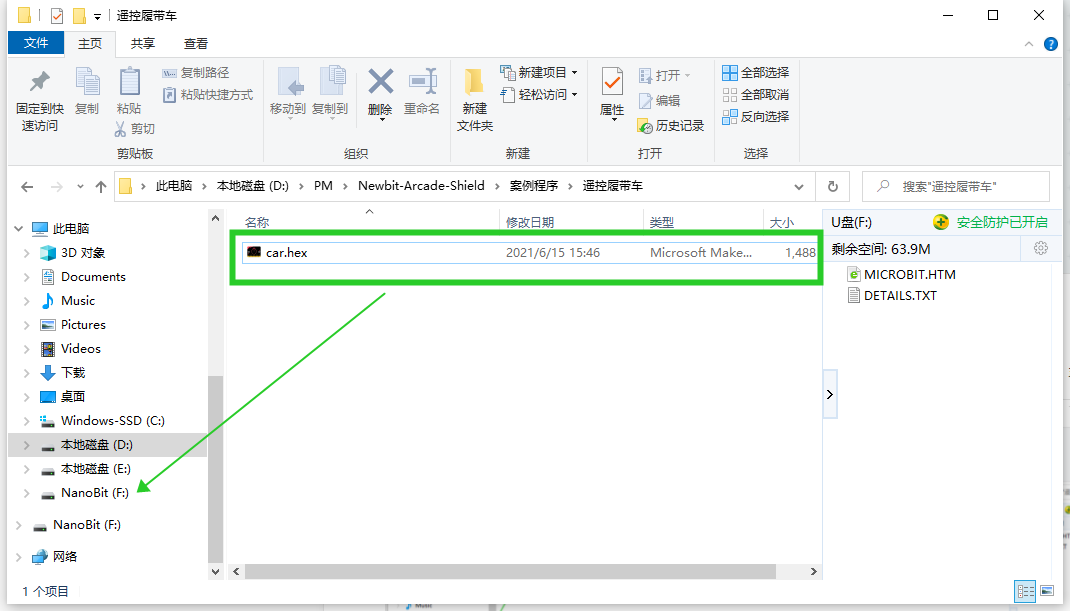
遥控端编程
由于Newbit Arcade Shield上的按键并非是通过MicrobitV2的IO口直驱,所以在Makecode中暂时无法使用。
这里需要前往Arcade编程平台使用。
编程平台
- 前往 https://arcade.makecode.com/
- 新建项目进入编程主页
加载插件
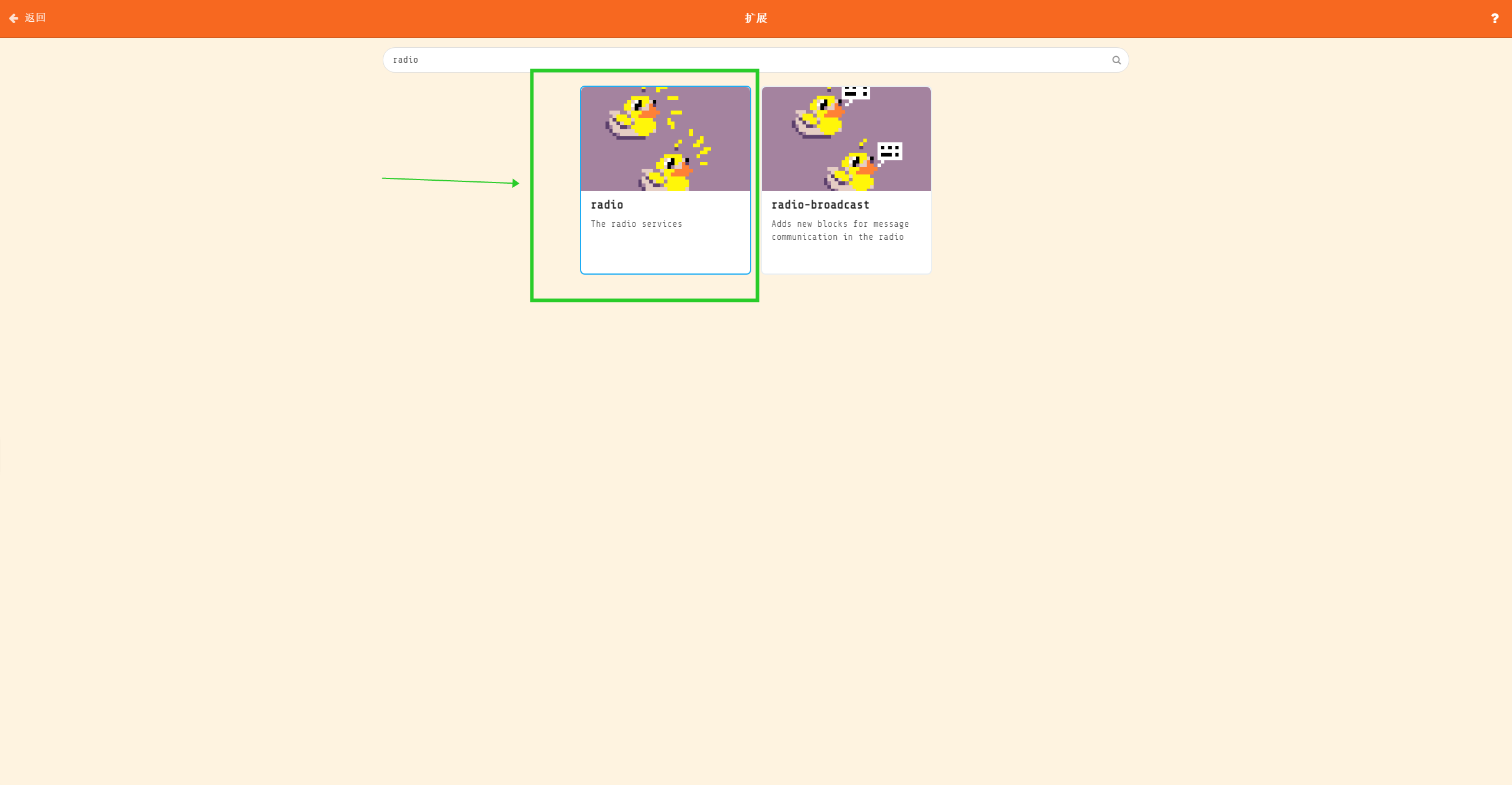
由于本项目使用的无线功能在Arcade中是作为附加插件存在的,所以需要额外加载。
搜索radio,选择第一个即可。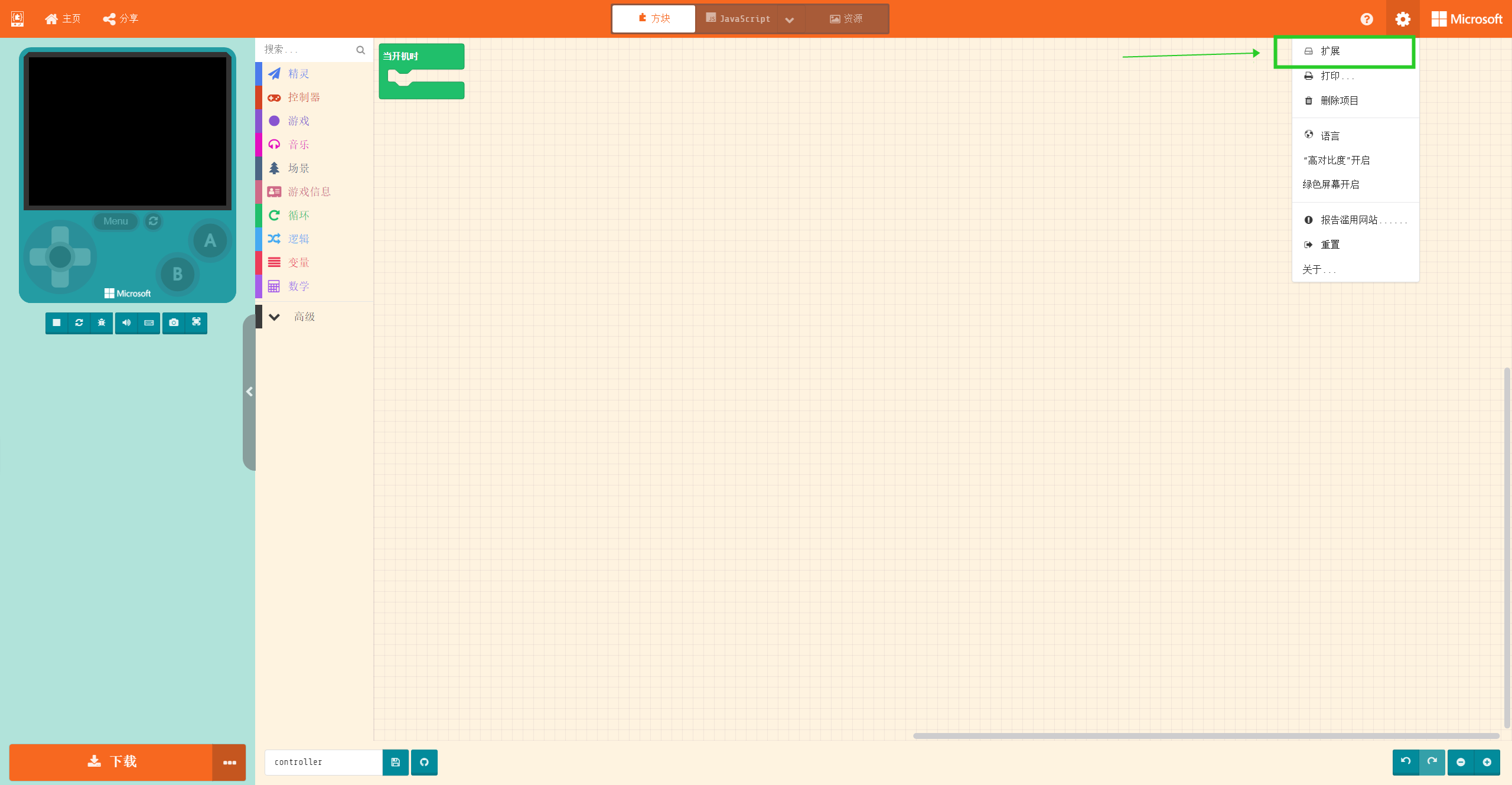
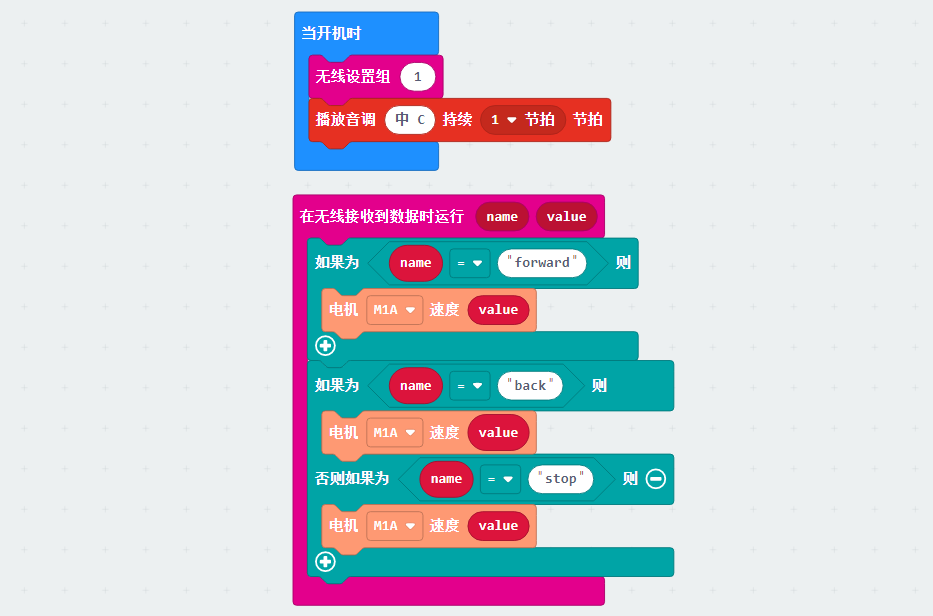
编写程序
手柄端主要的功能为通讯和发出控制信号,要完成按下上键小车往前;按下下键小车后退;什么都不按则小车停止,我们可以这样写。(对于固定速度的前进和后退其实并不需要用到键值对,可根据案例自行拓展)。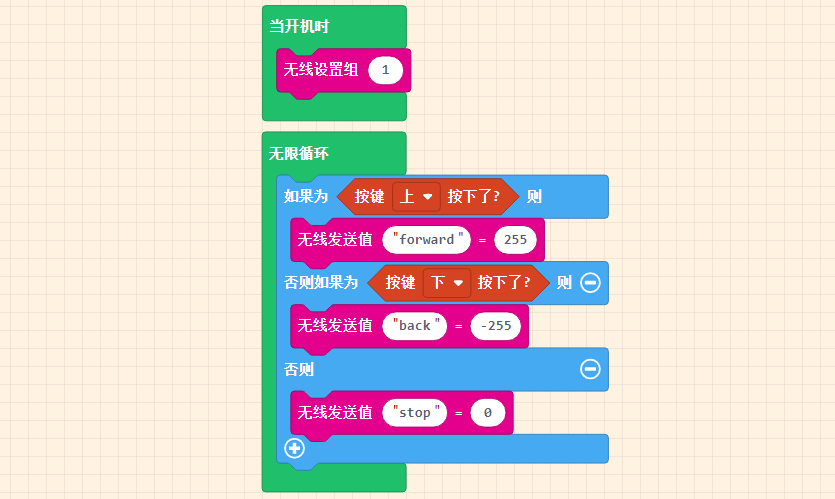
下载程序
由于目前对于Arcade平台官方而言,MicrobitV2(nRF52833)还在测试阶段,所以我们需要首先去到平台的设置页面将还在试验版本的硬件选项开放出来。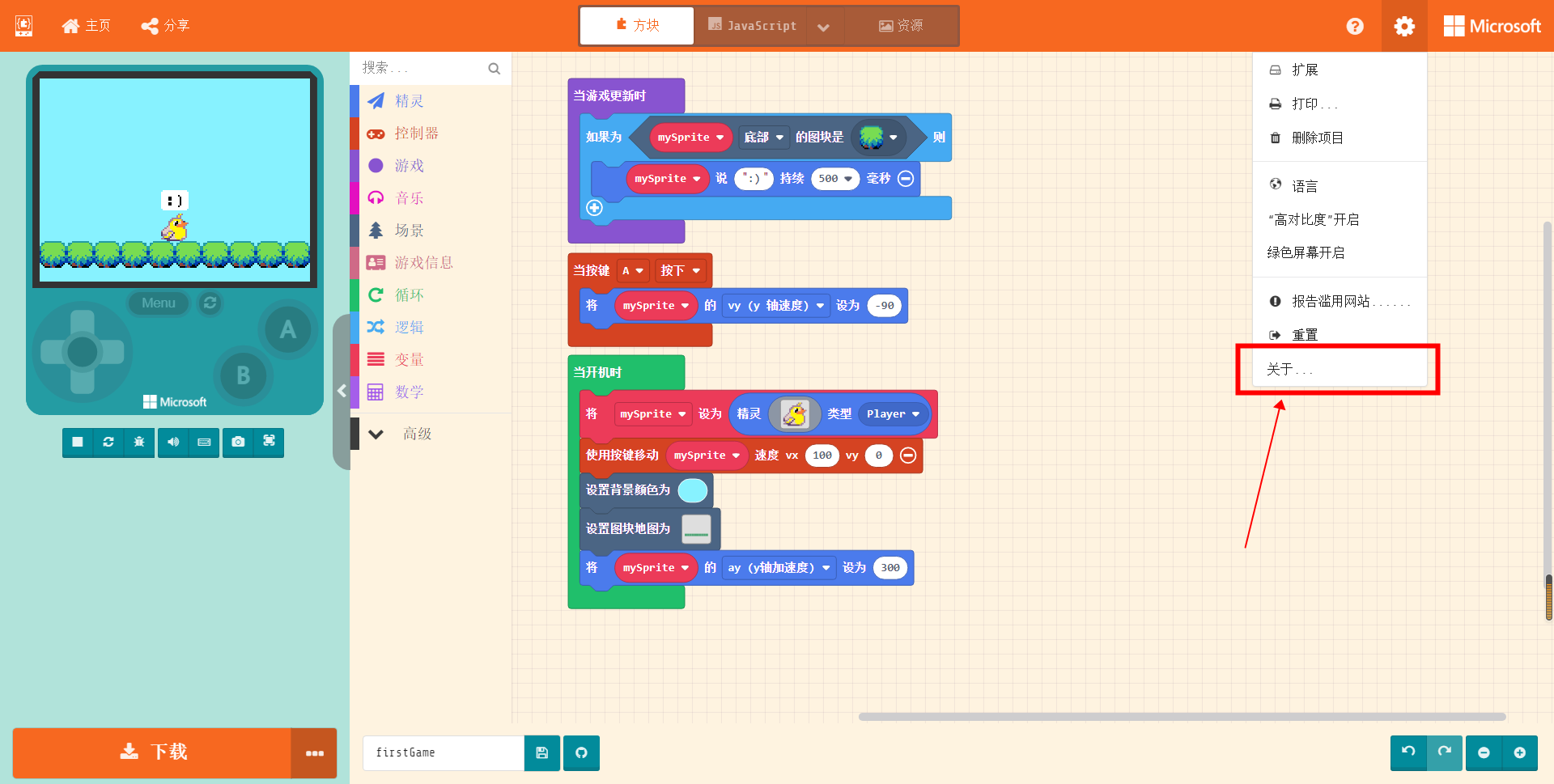
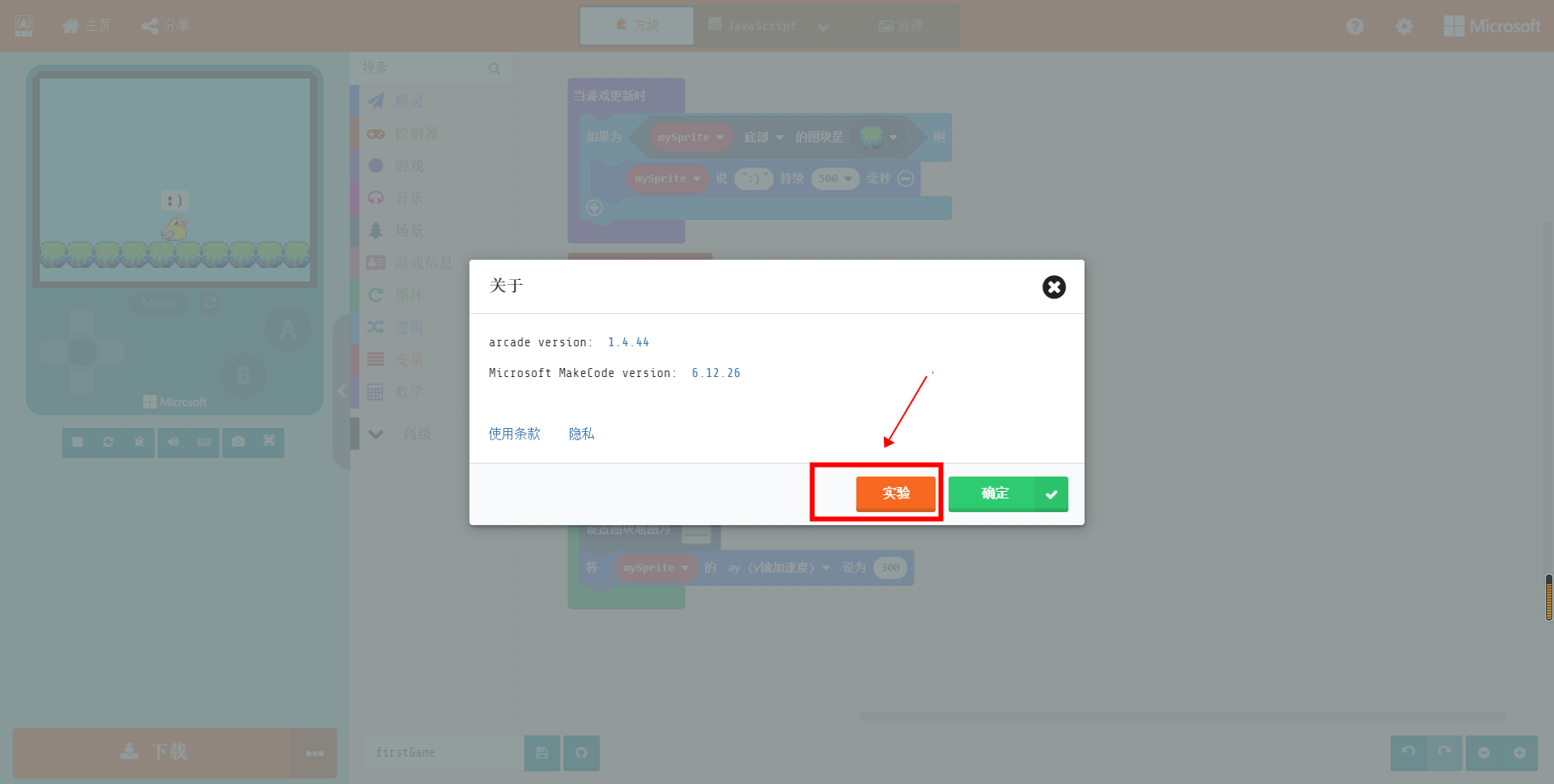
确保Expermental Hardware是已启用状态(只需要设定一次即可)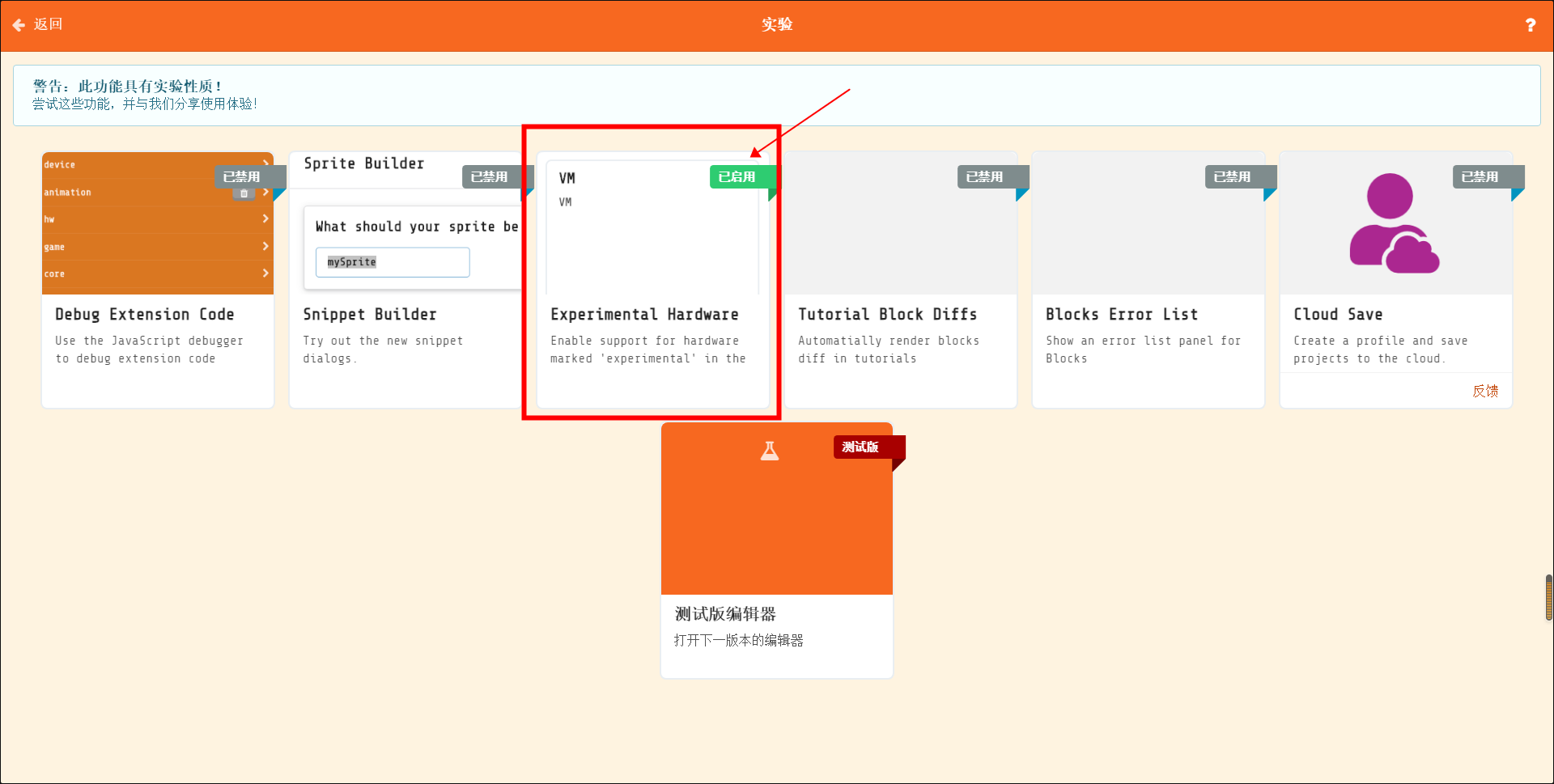
接着返回到编程主页,点击左下角的下载按钮,在弹出的选择硬件窗口拉到最底部选择N3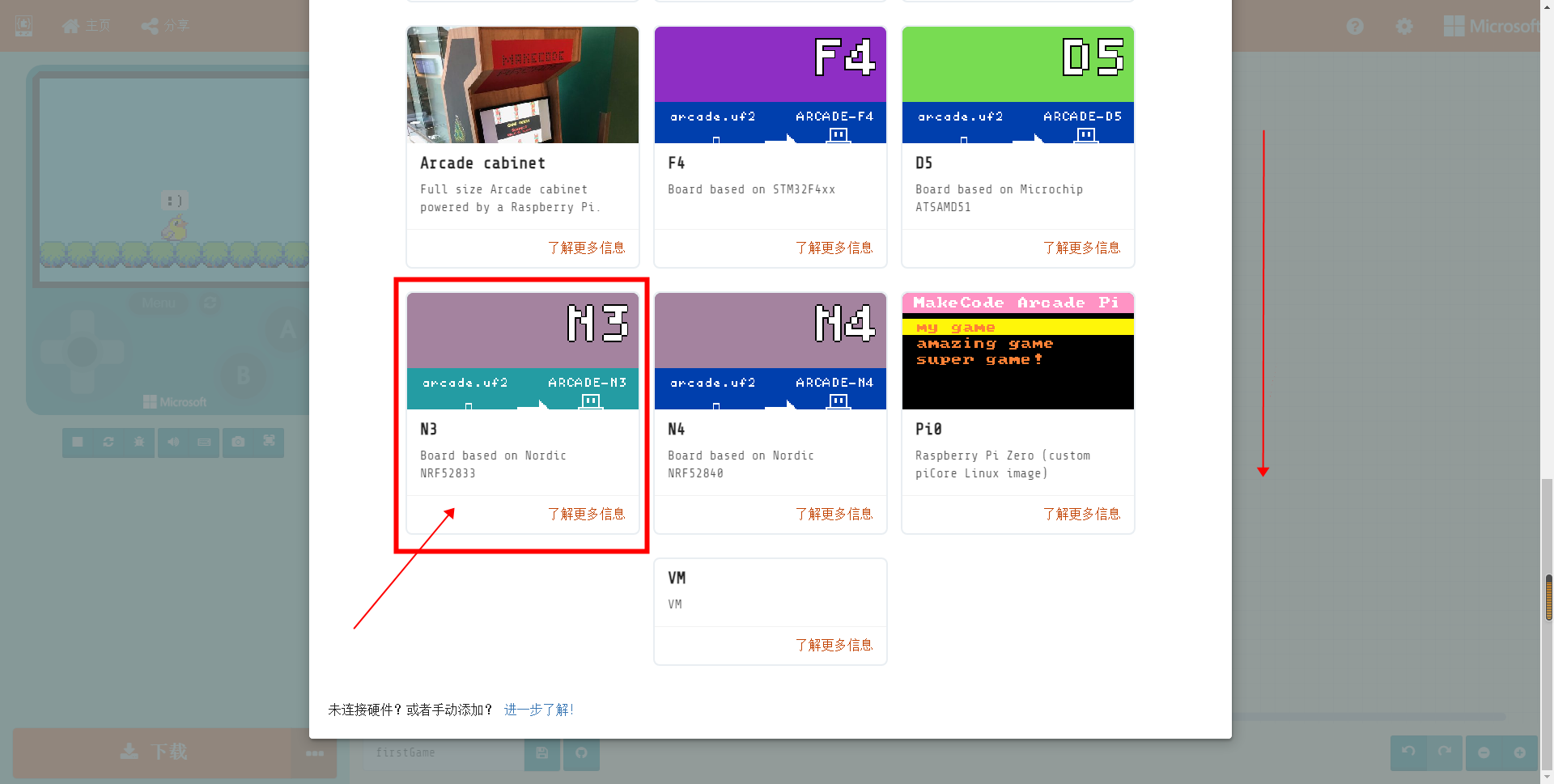
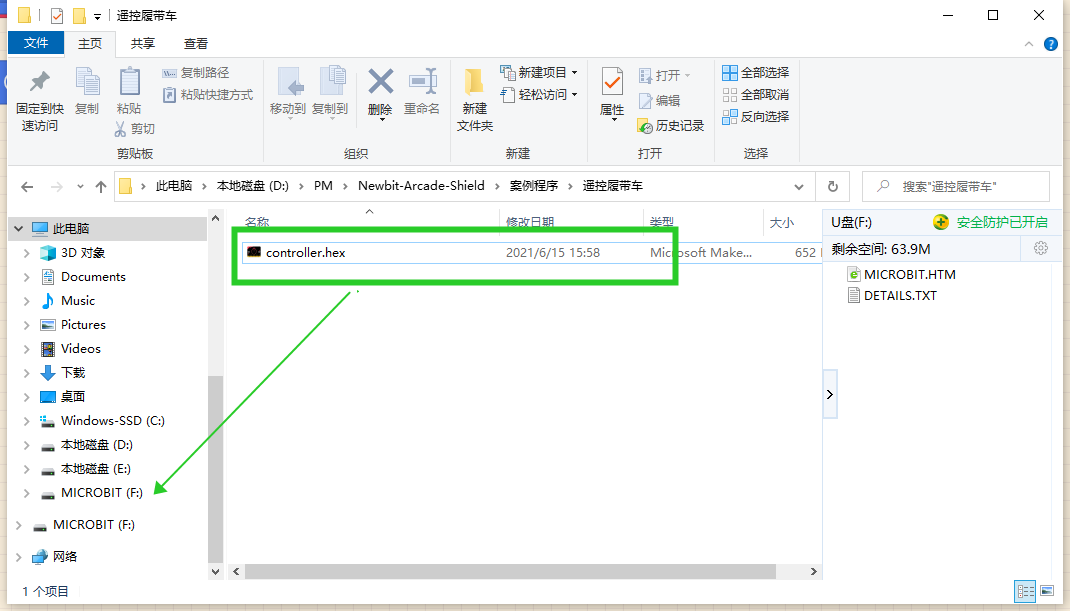
确保使用MicroUSB数据线连接主控板后,将下载得到的.hex程序文件拖入到名为MICROBIT盘符。