使用教程
前言
需要对Kittenblock或Makecode编程平台的使用有所了解,包括会涉及到的Kittenblock在线互动和离线上传两种模式的编程方式,以及Makecode的插件地址,这里做一个简单介绍,后续不会用篇幅额外篇幅描述
- 在线互动
在线互动也称为硬件与电脑通过USB串口通讯,需要往Micro:bit里上传一个固化的通讯程序(也称作恢复固件
确保恢复了固件并且在②处连上了串口,只需要点击软件里的积木块就能让Micro:bit运行对应功能
- 离线上传
要使Micro:bit脱离电脑还能运作对应功能,需要将编写的程序上传到Micro:bit中,Kittenblock提供积木块转译代码并上传的功能(需要确保你的积木块都包含在小旗子积木块下,如左图

- Makecode插件地址:Robotbit
Robotbit Shield
这是接插在Robotbit上用于扩展出PH2.0防反接端子口的扩展板
| 1 | PH2.0 4PIN I2C接口 |
|---|---|
| 2~9 | PH2.0 3PIN接口 |
| 10 | PH2.0 4PIN接口,与能量模块主控盒上的PORT2口对应 |
| 11 | 4PIN I2C排针接口 |
| 12 | 电压切换开关,用于切换13号排针电压,电压范围3.3V~5V |
| 13 | 3PIN排针接口,VCC电压由12号开关决定,电压范围3.3V~5V |
| 14 | 电源指示灯 |
| 15~17 | 接插Robotbit |
猫耳洞超声波
猫耳洞超声波兼容3.3V和5V,只需3根线(有别于普通4线超声波)
🔺接线:这里用microbit的P2脚作为超声波的信号脚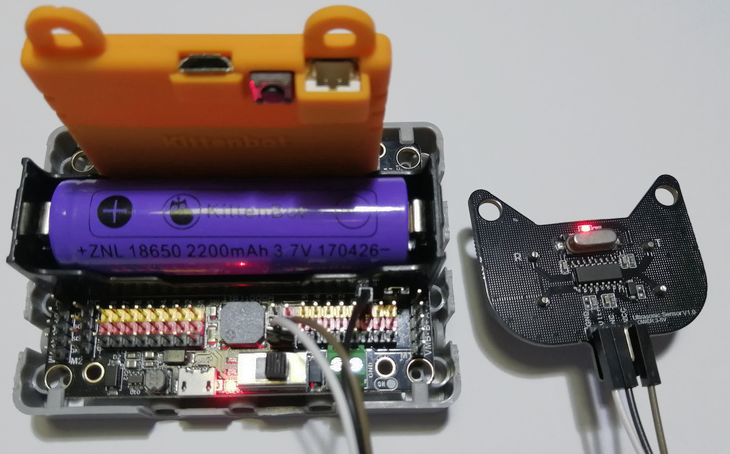
🔺Kittenblock编程:
- 在线互动
用猫头超声波控制舞台上的小猫角色大小,当超声波里障碍物较近时,小猫变小,离障碍物较远是小猫变大
- 离线上传
当检测到15cm内有物体,microbit显示表情变化
🔺Makecode编程:
当检测到15cm内有物体,microbit显示表情变化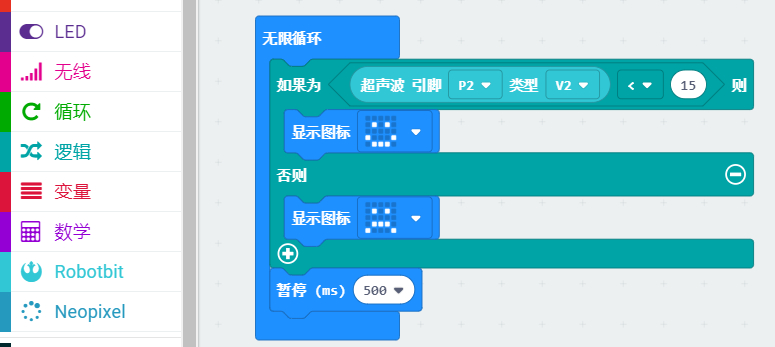
TT电机
喵家TT电机采用低电流高扭矩,铜线圈,质量优良
🔺接线:Robotbit左右两侧的M1和M2接口,左侧连载M2B,右侧M1A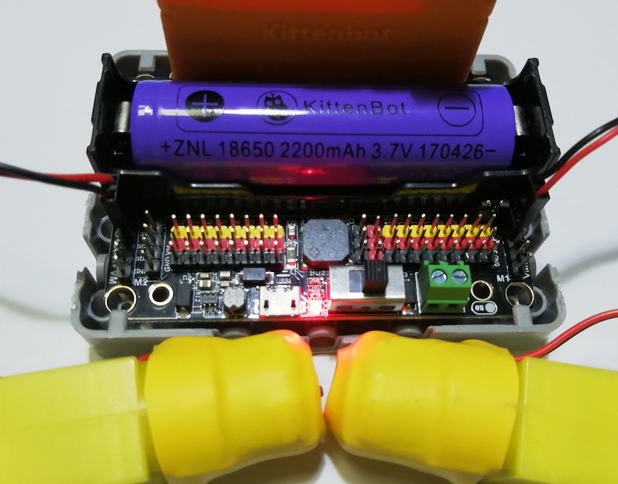
🔺Kittenblock编程:
- 在线互动
使用电脑键盘的方向键和空格键控制电机转动方向
- 离线上传
电机正转2秒,停止1秒后电机反转,反转2秒后停止,1秒后又开始正转 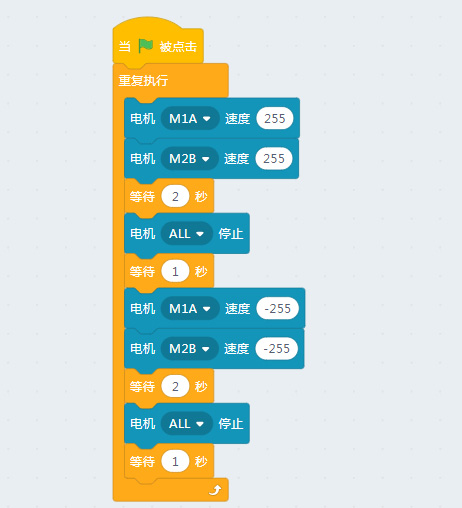
🔺Makecode编程:
电机正转2秒,停止1秒后电机反转,反转2秒后停止,1秒后又开始正转 
乐高风扇
乐高风扇与控制马达的方法一样,风扇兼容乐高颗粒件和科技件
🔺接线:这里接了M1电机接口的A+、A-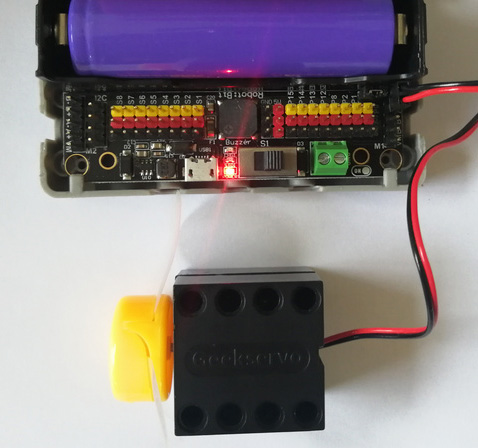
🔺Kittenblock编程:
- 在线互动
搭建如下程序实现用键盘的→和←分别控制风扇正反转速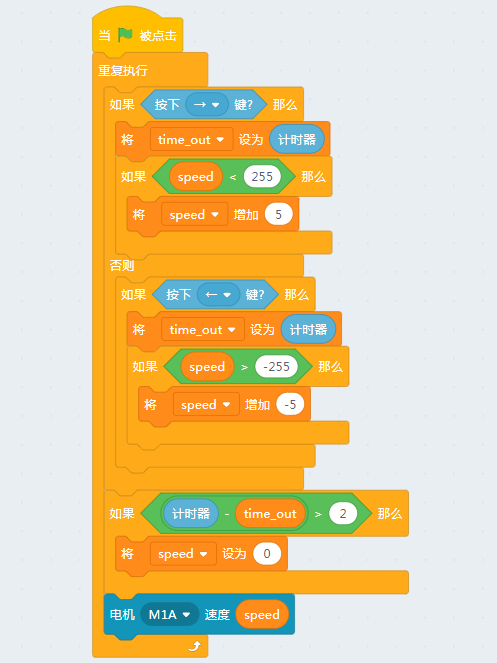
- 离线上传
电机正转2秒,停止1秒后电机反转,反转2秒后停止,1秒后又开始正转 
🔺Makecode编程:
电机正转2秒,停止1秒后电机反转,反转2秒后停止,1秒后又开始正转 
Geekservo 9g灰色舵机
Geekservo系列是喵家推出兼容乐高拼搭的执行器,灰色为舵机,可旋转角度范围在-45~225°
(20ms周期,脉宽为500~2500 us)
🔺接线:接在S1口,注意线序方向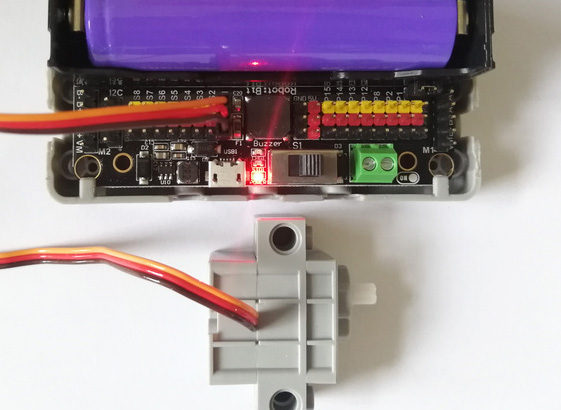
🔺Kittenblock编程:
- 在线互动
程序实现让箭头角色说出并旋转到当前的角度,舵机每次旋转1度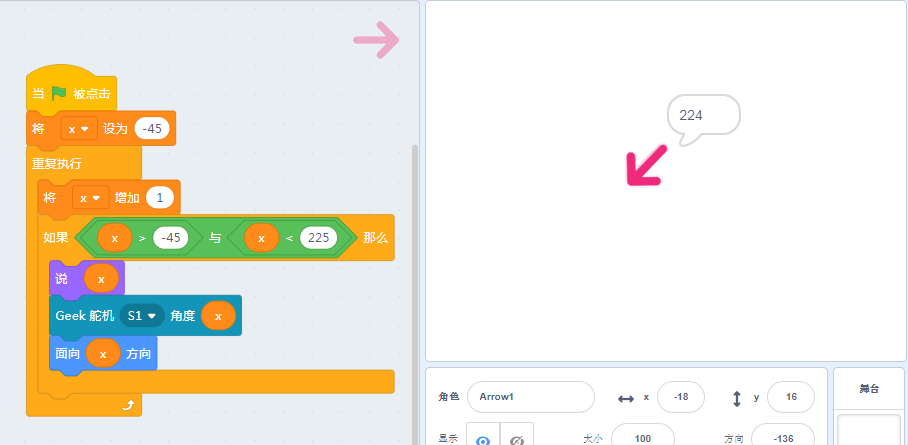
- 离线上传
每隔2s改变一次舵机的角度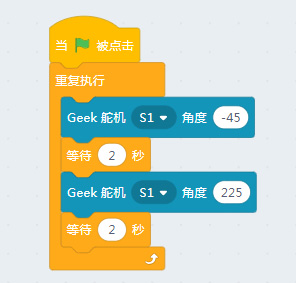
🔺Makecode编程:
每隔2s改变一次舵机的角度
光敏传感器
光敏传感器返回值是模拟值0~1023,并且光线越亮,数值越大
🔺接线:接在Robotbit Shield的P1端口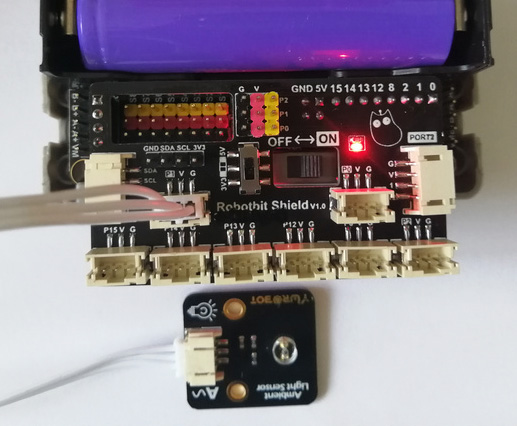
🔺Kittenblock编程:
- 在线互动
用光敏模块检测到的亮度切换舞台背景,当检测到的亮度小于200时,切换到白天背景,否则为晚上背景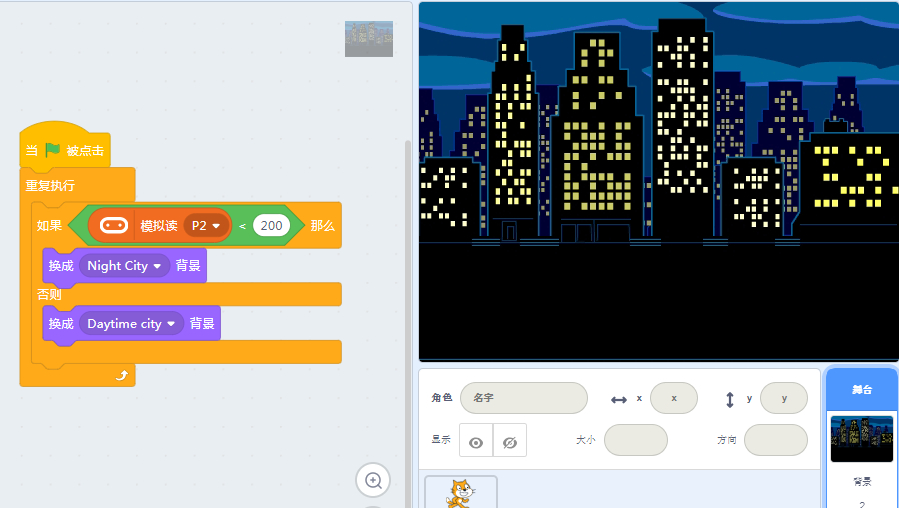
- 离线上传
Microbit点阵屏每隔1秒循环显示当前的亮度值,光敏模块检测到的亮度越亮,数值越大 
🔺Makecode编程:
Microbit点阵屏每隔1秒循环显示当前的亮度值,光敏模块检测到的亮度越亮,数值越大 
旋转电位器
旋转电位器返回值是模拟值0~1023,原理是通过旋转调整电阻,进而改变电压
🔺接线:接在Robotbit Shield的P1端口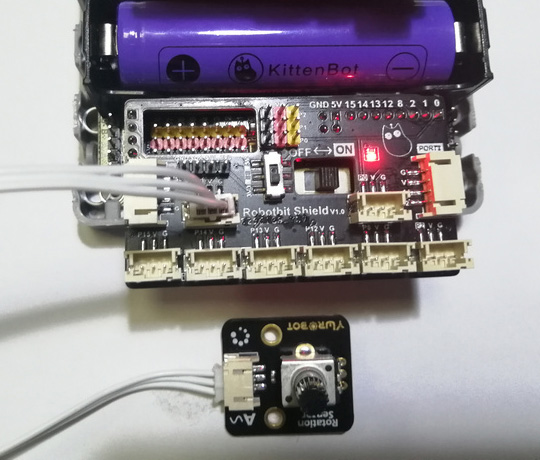
🔺Kittenblock编程:
- 在线互动
与舞台小猫或者舞台透明度互动均可,此处暂略
- 离线上传
Microbit点阵屏每隔1秒循环显示当前的模拟值,通过旋钮调整
🔺Makecode编程:
Microbit点阵屏每隔1秒循环显示当前的模拟值,通过旋钮调整
火焰传感器
火焰传感器检测波长760-1100nm,检测距离30-800mm,探测角度约60°,输出模拟量电压,对普通光有反应,但对火焰最敏感
🔺接线:接在Robotbit Shield的P1端口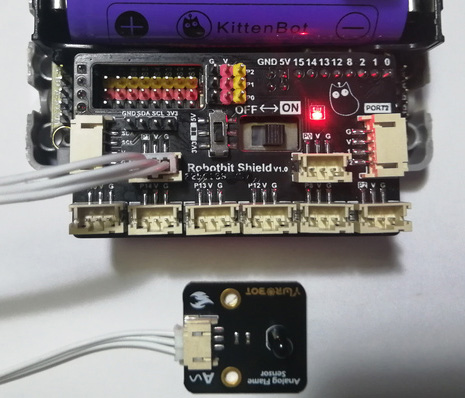
🔺Kittenblock编程:
- 在线互动
小猫说出当前检测数值,探测到火焰的时候数值最大
- 离线上传
Microbit点阵屏每隔1秒循环显示当前的模拟值,检测到火焰的时候数值最大
🔺Makecode编程:
Microbit点阵屏每隔1秒循环显示当前的模拟值,检测到火焰的时候数值最大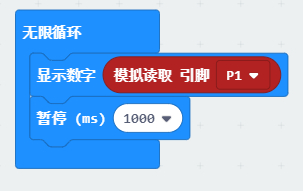
土壤湿度传感器
土壤湿度传感器用于插入土壤中检测水分含量,原理为利用电阻变化测量水分湿度,土壤越干燥,输出电压越小。越湿润输出电压越大。常用于结合水泵进行自动浇花系统
🔺接线:接在Robotbit Shield的P1端口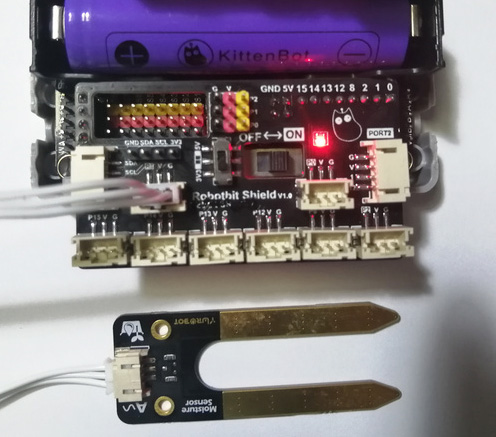
🔺Kittenblock编程:
- 在线互动
实现土壤传感器检测当前的土壤湿度值,如果土壤湿度小于50,则切换到Savanna背景,否则切换到Arctic背景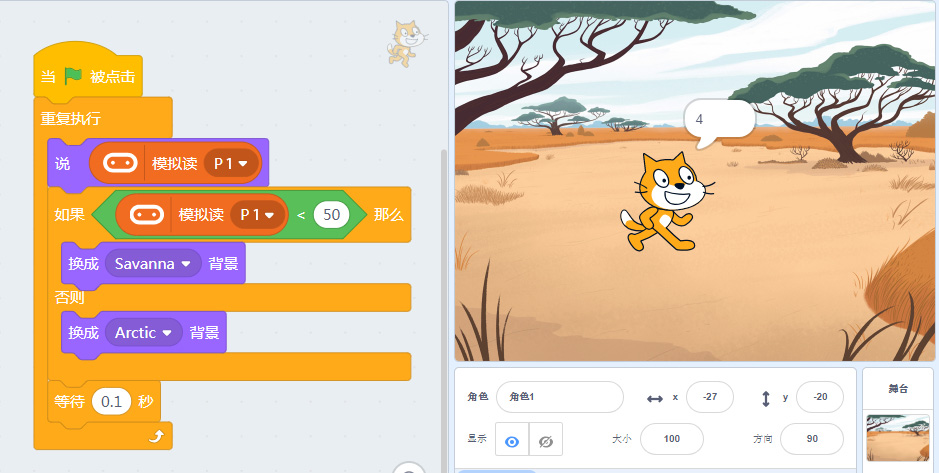
- 离线上传
Microbit点阵屏每隔1秒循环显示当前的土壤湿度值,检测到的土壤越湿,数值越大 
🔺Makecode编程:
Microbit点阵屏每隔1秒循环显示当前的土壤湿度值,检测到的土壤越湿,数值越大
水位传感器
实际不止检测水,而可以称之为液位传感器,利用电阻变化测量液位高度,液位越高传感器与水面接触面积越大输出电压越高,反之减小,通常和水泵连接,组成水位动态调整系统(传感器属于沉浸式,但切勿超过警戒线
🔺接线:接在Robotbit Shield的P1端口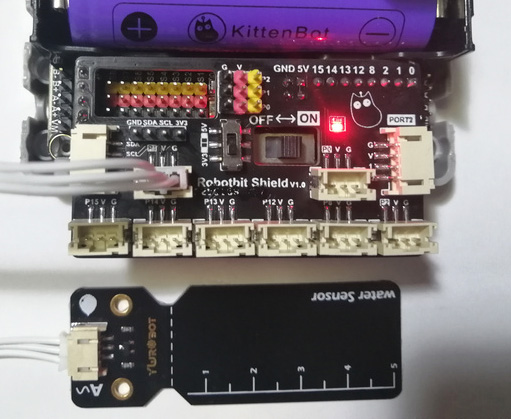
🔺Kittenblock编程:
- 在线互动
与舞台角色互动,通过改变角色来形象得映射实际水位高低,此处暂略
- 离线上传
Microbit点阵屏每隔1秒循环显示当前的水位值,且水位越高,数值越大
🔺Makecode编程:
Microbit点阵屏每隔1秒循环显示当前的水位值,且水位越高,数值越大
干簧管磁铁传感器
无磁铁保持高电平,有磁力输出低电平,且带有LED输出指示
🔺接线:接在Robotbit Shield的P1端口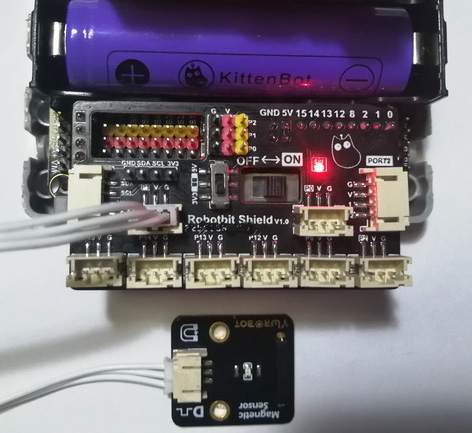
🔺Kittenblock编程:
- 在线互动
在舞台上添加一个苹果角色,用鼠标将苹果拖放到任意位置,随后在苹果角色中写入程序,如果干簧管传感器遇到磁铁,苹果会移动到小猫旁边 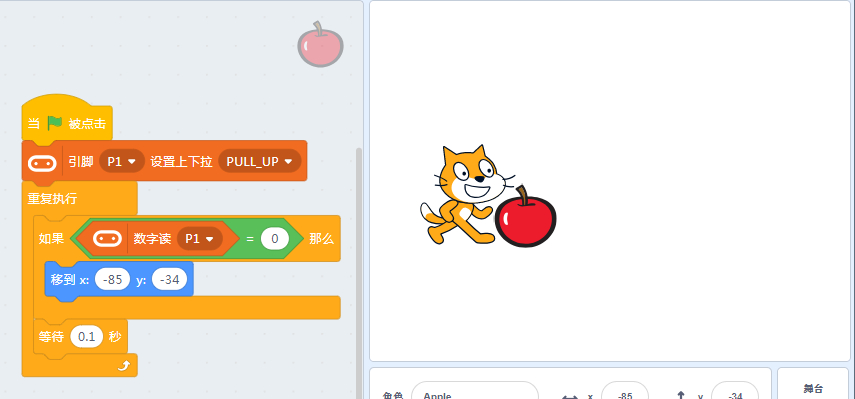
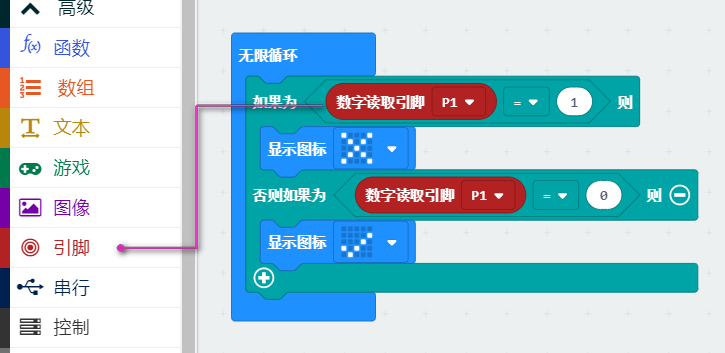
- 离线上传
当没有磁性物质靠近时,开关断开Microbit点阵屏显示“X”图案,当磁性物质靠近时,开关闭合Microbit点阵屏显示“√”图案 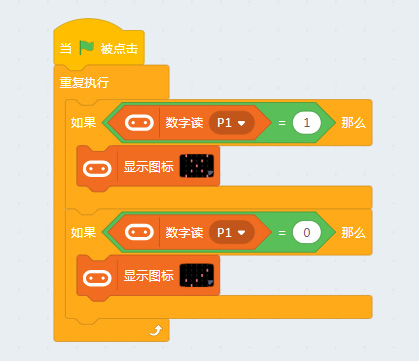
🔺Makecode编程:
当没有磁性物质靠近时,开关断开Microbit点阵屏显示“X”图案,当磁性物质靠近时,开关闭合Microbit点阵屏显示“√”图案