前期准备
关于AI垃圾分类提供了两种案例,一种是交互式分类,另外一种是采用的是特征分类识别。
但在这之前我们还有一些准备工作要做。主要包括资料和材料的准备,以及结构的搭建。
材料准备
你可以自备零件 或者 直接购买喵家淘宝的 AI人工智能 2022垃圾分拣学习套件,省心方便
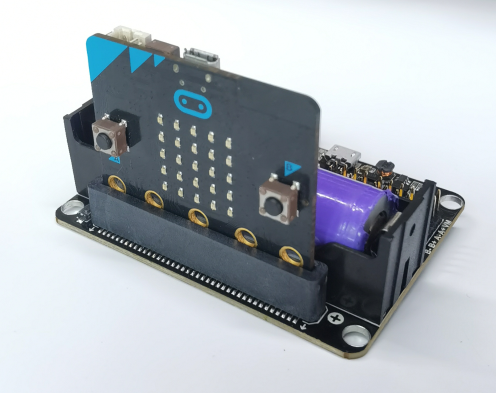
- Microbit主控板,USB数据线
- robotbit扩展板 KittenBot-Robotbit
- 4xGeekservo灰舵机
- 相关乐高结构
- 垃圾分类垃圾桶 + 分类卡片。
- USB摄像头和摄像头支架(用于识别种类卡片,不推荐用电脑自带摄像头的原因是,分离式的摄像头录入图片数据,调整USB摄像头为俯视状态录入会更方便些)
制作过程
调整舵机角度
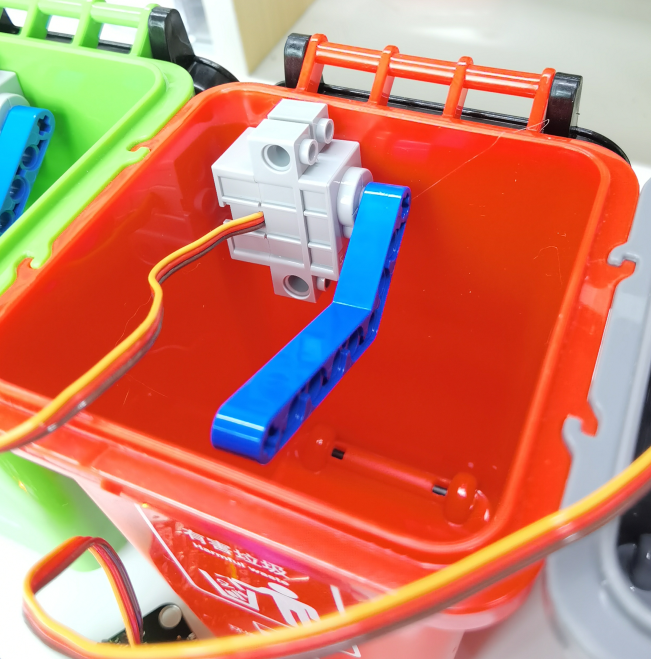
粘贴舵机
我们的垃圾桶是没有乐高孔,可以借助AB胶或者热熔胶枪把舵机粘贴垃圾桶的内侧壁上。
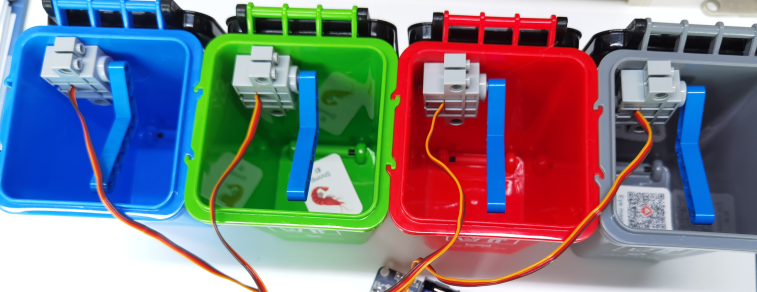
在舵机的凹陷涂上均匀的一层AB胶水或者热熔胶(这里演示是用热熔胶),趁热把舵机粘贴到垃圾桶上。注意舵机的粘贴位置尽量保持一致。这样软件上的控制就可以保持四个都是一致了。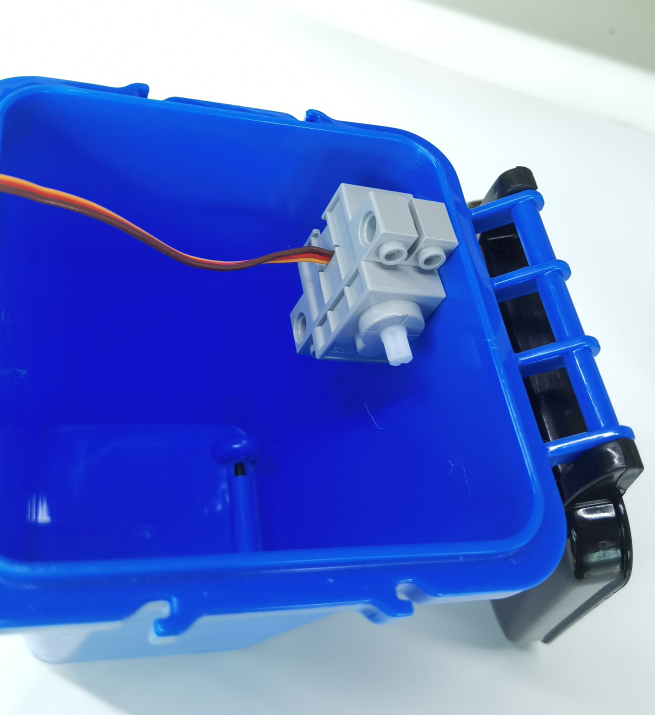

电路连接
Robotbit是增强Micro:bit实用性能、丰富其使用场景的优秀解决方案,作为Micro:bit的扩展板,Robotbit自身带有电机舵机驱动芯片,很好的解决了在使用Micro:bit想要制作机器人却止步于驱动能力弱的难处;通过板载的电源管理和电源保护电路,确保制作的项目能够独立运作,甚至在不慎短路或电流过大的瞬间能够通过暂时断开的方式保护板子和电池,无论是作为个人项目的创作还是教学场景的应用,都是安全和功能并存的好选择
Robotbit的主控是Microibt,采用主流的主控板可以减少用户的学习成本。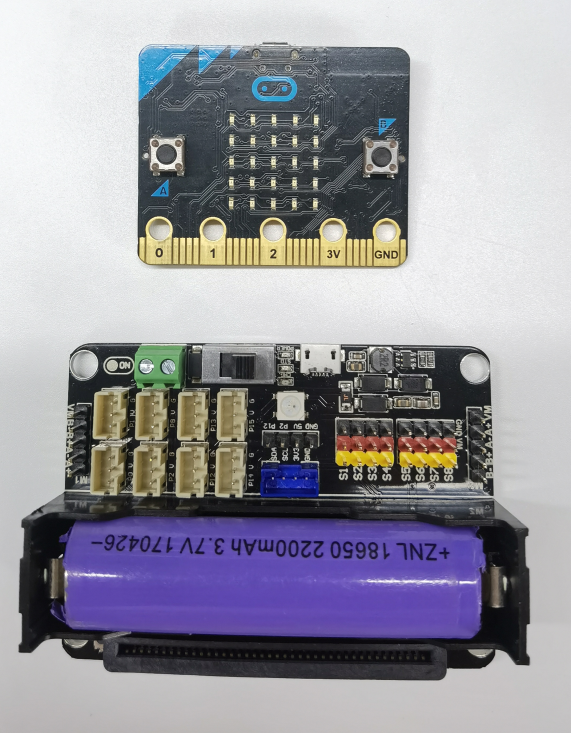
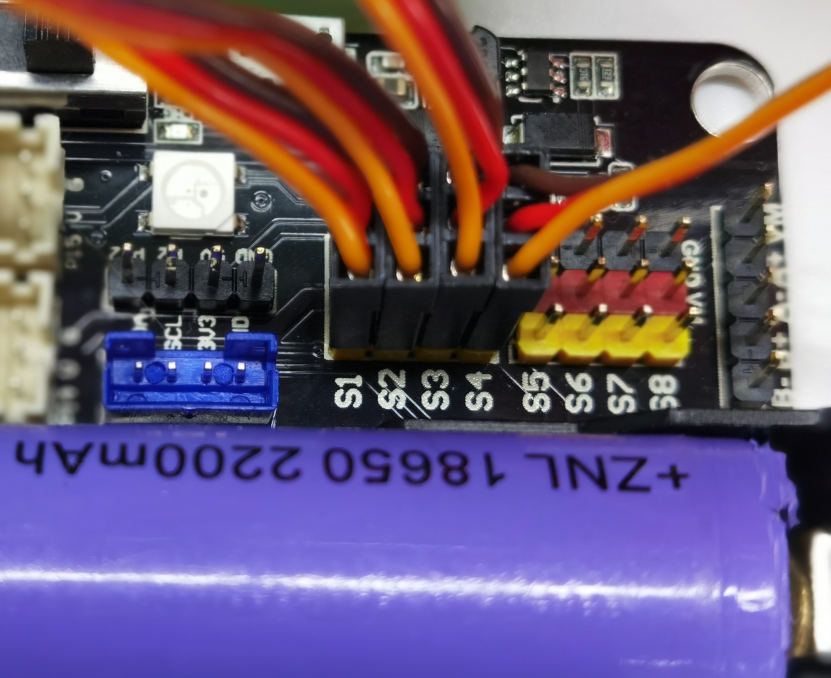
舵机接线:
舵机的线序是由黄红黑组成,恰好对应主控盒背后的黄红黑插针。注意不要插错。舵机我们这边是接S1-S4
- 可回收物—>S1
- 厨余垃圾—>S2
- 有害垃圾 —>S3
- 其他垃圾—>S4信息
请一定按照我的方式进行插接奥,方便程序的调试。

调整舵机角度
加载microBitV2 插件
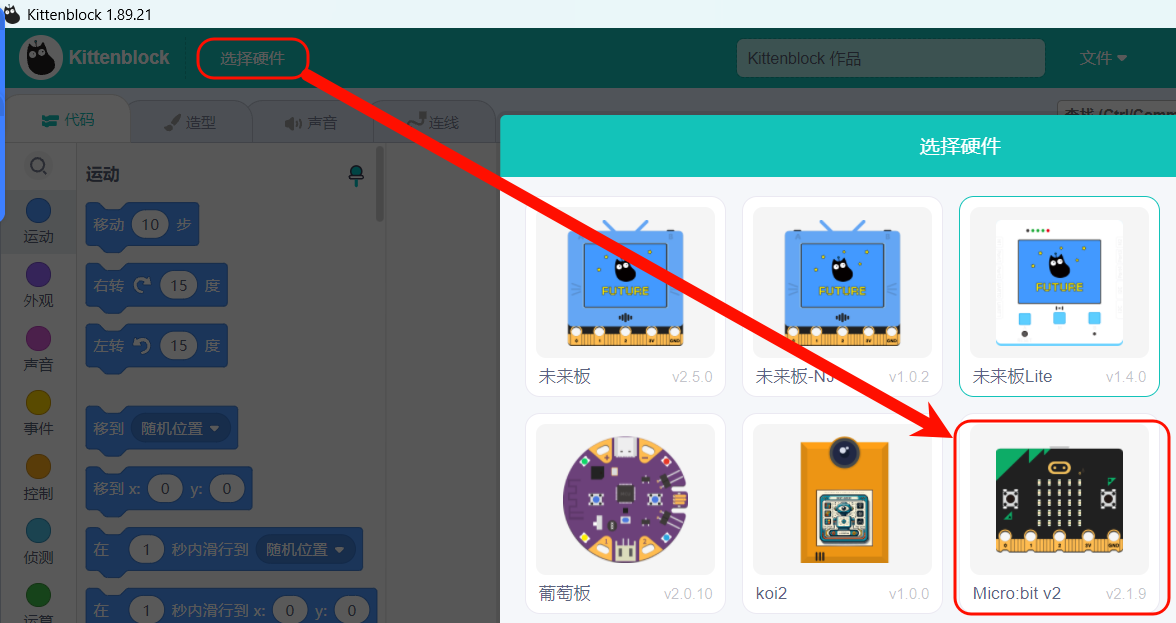
连接串口:将microbit连接数据线,与电脑连接
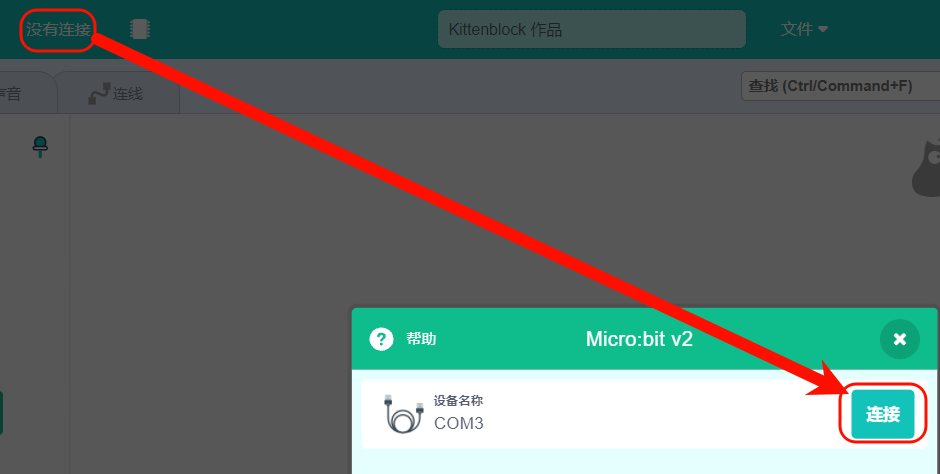
点击恢复固件图标,给microbit下载一个通讯固件,用于在线调试使用

编写程序,点击积木块,将舵机设置为0度

将摇臂与舵机按照如图角度安装,这么做是为了让所有舵机角度一致,方便控制垃圾桶。
测试垃圾桶的打开和关闭
首先请合上所有垃圾桶盖子编写程序,点击积木块,将舵机设置为0度
此时垃圾桶会打开盖子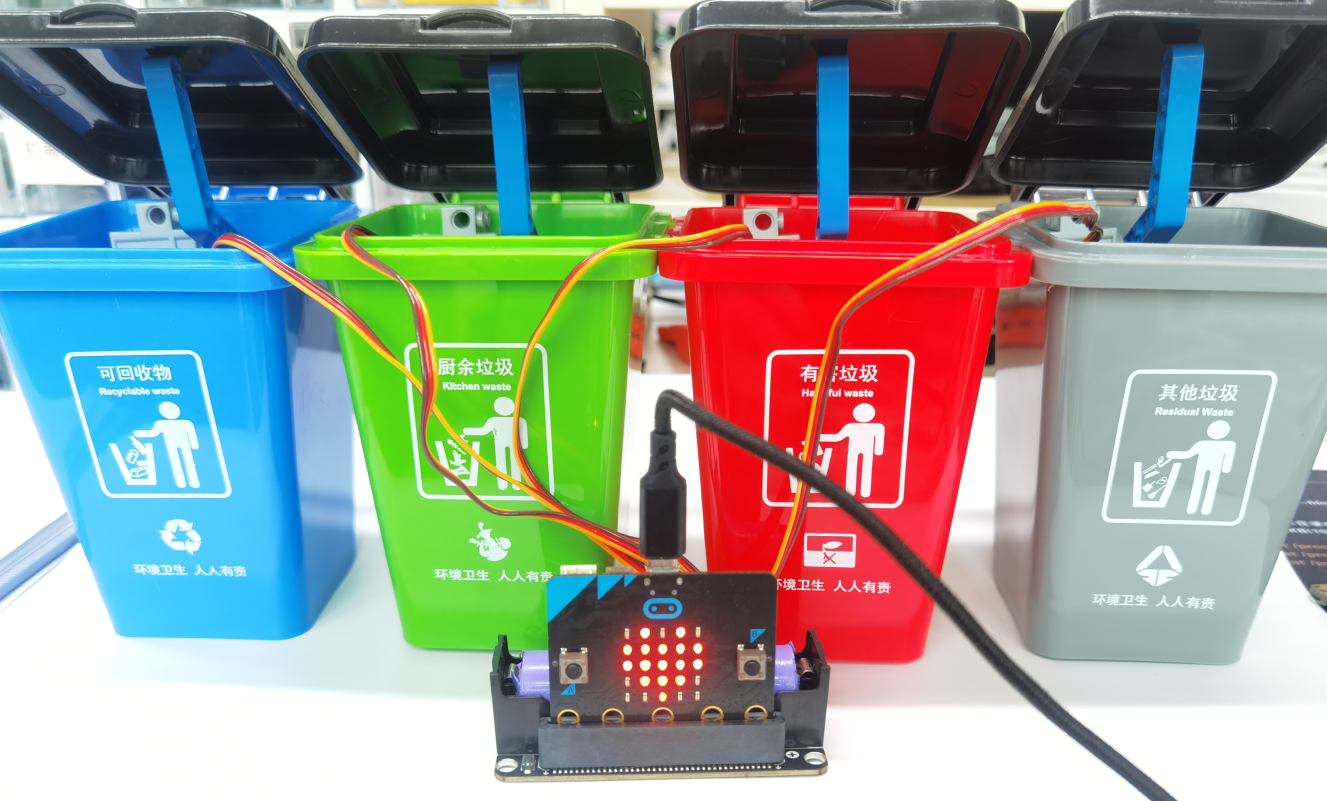编写程序,点击积木块,将舵机设置为90度
此时垃圾桶会关闭盖子

至此前期准备工作已完成。