02-硬件连线
连线引擎方便写一些硬件相关的项目帖子,不用混乱的接线实拍图而采用清晰明了的平面图,让硬件间的连接一目了然,同样也方便老师教学和写书时使用。并且有一个优点就是这个接线图会根据.sb3程序文件一同保存
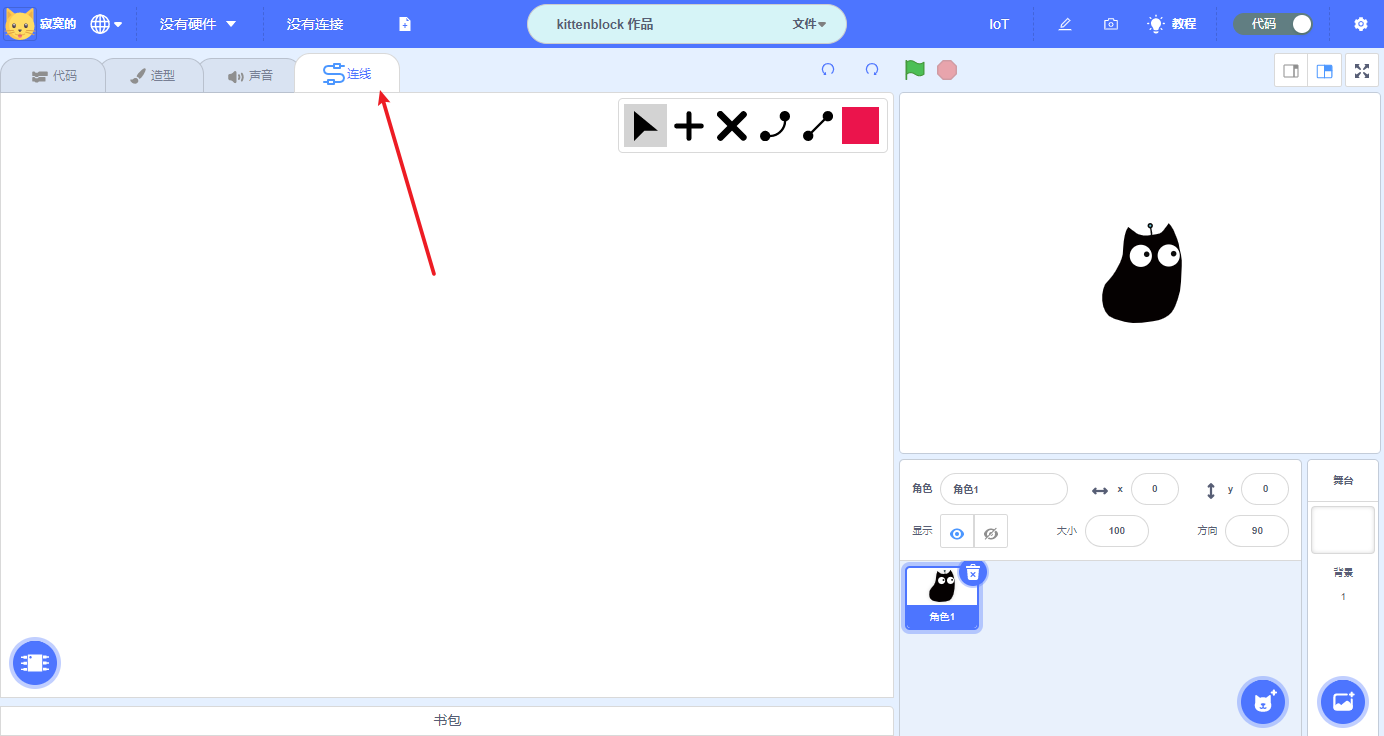
- 硬件连线的编辑界面位于第4功能栏危险
第一次进入这个界面是空白的是正确现象,因为初始化的项目是没有人为它建立过连线图的,它就是一张白纸等着你来'绘制'
加载硬件图片
- 界面左下角的悬浮按钮,点击选择连接元件

- 里面有我们内置的一些硬件,普片都是喵家自己的产品和市面上一些常见的传感器,点击能够加载到界面
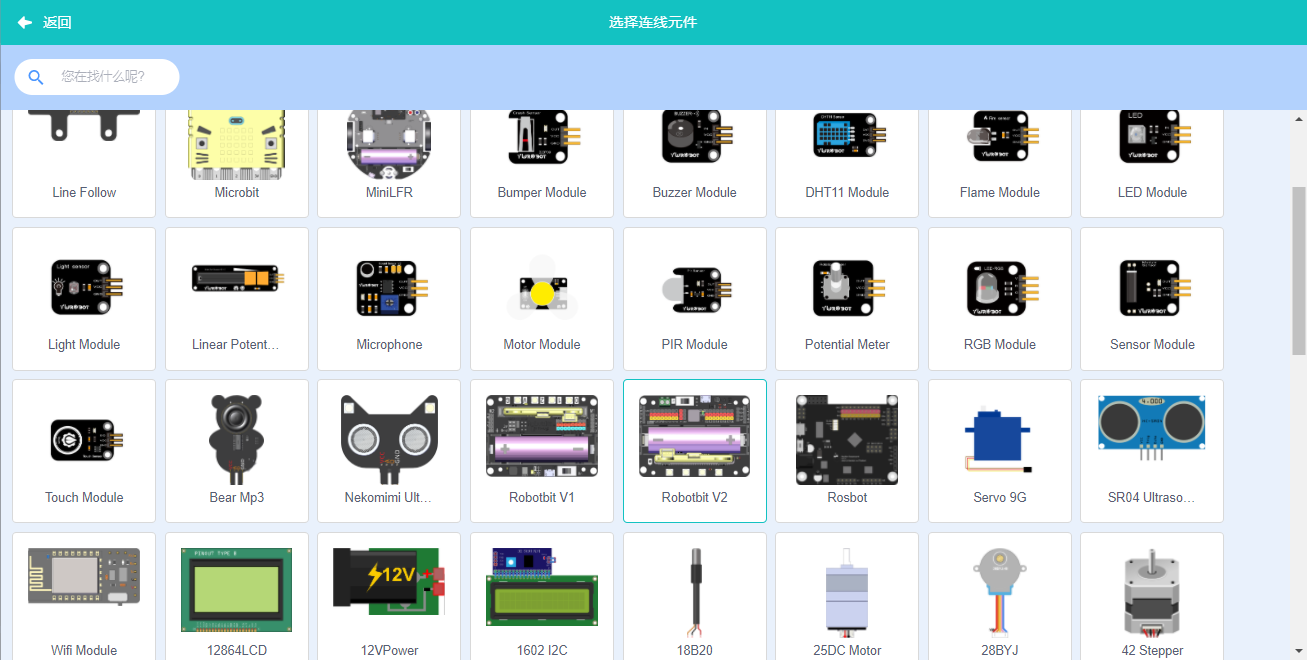
- 拖动缩放条可以进行缩放

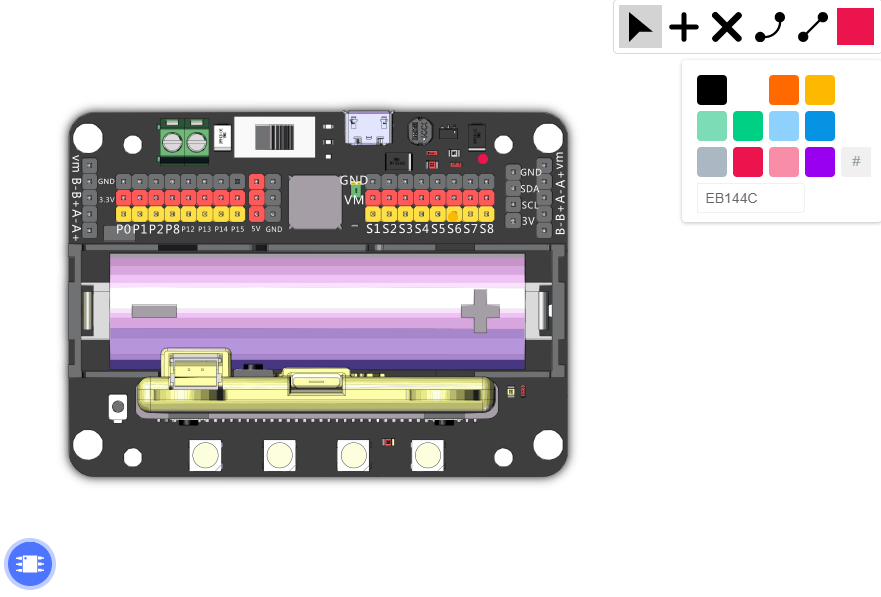
鼠标左键双击 给硬件引脚添加节点,然后选择点可以在右侧的编辑栏更换颜色
危险连线引擎并没有智能的自动吸附等功能,你可以理解成他就是一个画板,只提供了基本的打点和点与点间的连线操作,并不带任何电气属性和逻辑判断,你甚至可以在板子任意位置上双击打点,就像画画那样自由
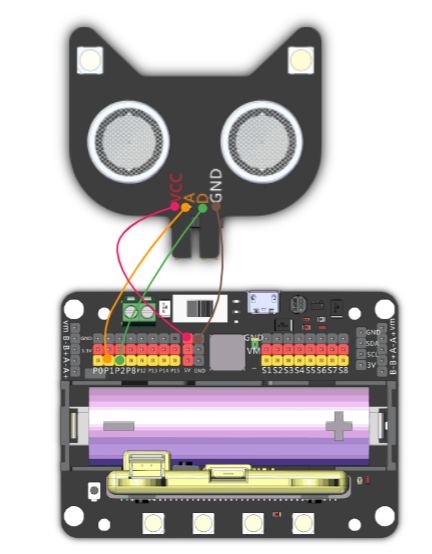
给新加进来的超声波魔块的引脚处也打好点,改成和Robotbit端引脚需要对应的颜色一样,将鼠标点击其中一个点不要松开然后拖动可以看到线条被拖出来了,此时移动到另一个要对应连接的点的位置后松开,他们变更可形成一条线。
信息此时线是直的,但不难发现,将鼠标移到线上双击左键后能在线上打点,同样的道理我们拖动线上的点能然曲线弯曲,多试几次就很熟练啦
添加外部硬件素材
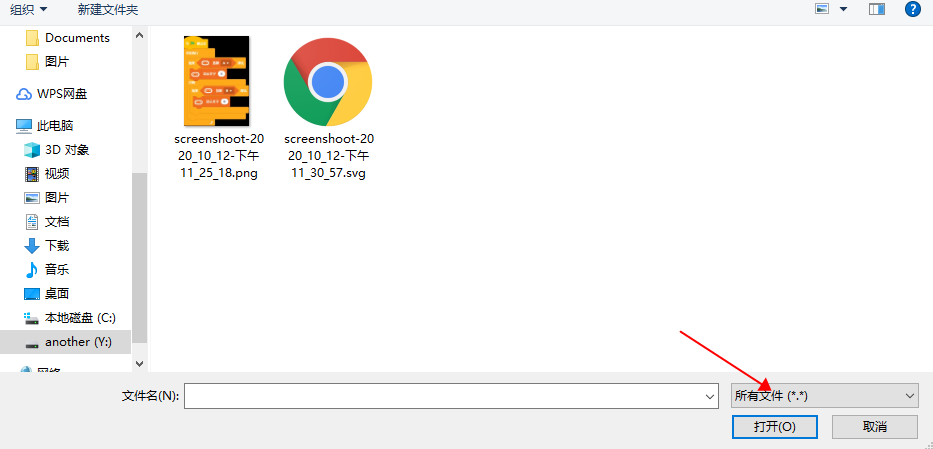
- 选择本地零件按钮,

- 将右下角改成 所有类型 这样就能选择任意一张图片,建议png或者svg类型的图片
信息
这些硬件图片可以通过一款叫做Fritzing的软件完成