10-巡迹智械
- 巡线是一个悠远而不绝的应用领域,它的实现有许多中,诸如最基础的红外巡线、灰度巡线到高级的摄像头算法巡线,他们虽实现方法不同但在我们的使用环境下所达到的效果还是没什么差别的。
- 我们这里采用红外巡线方式。红外寻迹传感器含有红外发射和红外接收管,.当发射的红外光遇到黑线被吸收,红外接收不到,则不导通。使用2个探头则可以判断车身相对线条的位置,达到巡线的效果。
硬件结构
搭建图纸
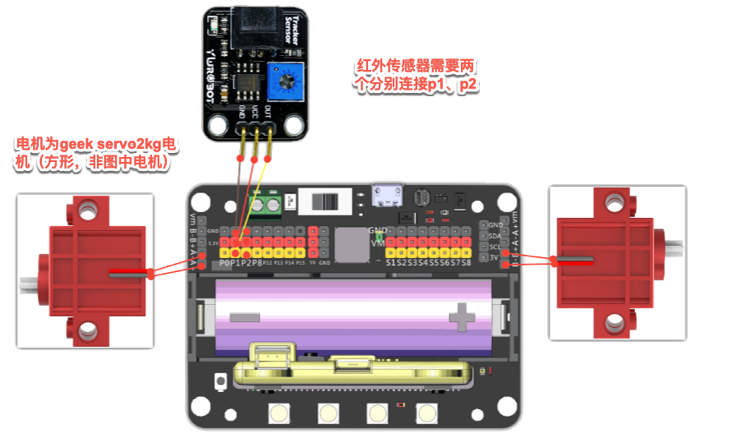
硬件接线
- P1接着小车右侧的红外模块,P2接左侧红外模块
- 电机的接线位置和小车方向对应,小车的左轮电机接Robotbit的左侧接口
红外探头使用
红外探头在使用中需要稍微了解一下它的工作原理
- 红外探头是包含一个红外光发送和一个红外光接收管,当接收端收到发出的红外后,内部导通,红色指示灯亮起。无法收到红外光的可能有2种,1是隔空超过了检测距离大概15cm未能反射,2是红外光打在黑色区域上被吸收。可见右图对比效果
- 当红外探头接收到反射光,红色指示灯亮起时,OUT引脚输出的是低电平
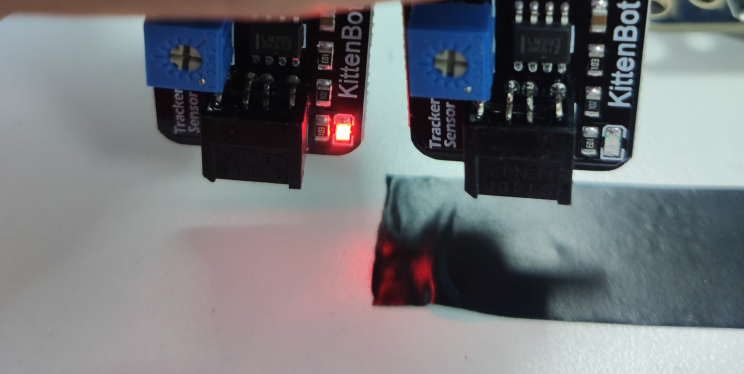
那么模块上有一个调节检测距离的旋钮,我们将他调整至红外探头装载小车上时,遇到黑线能熄灭,在白色区域能亮起红灯的这样一个状态,这一步不难但很重要,请仔细调节
从舞台编程中了解巡线原理
案例实现
- 通过结合舞台画笔工具,我们大概绘制了巡线整个场景的原型图
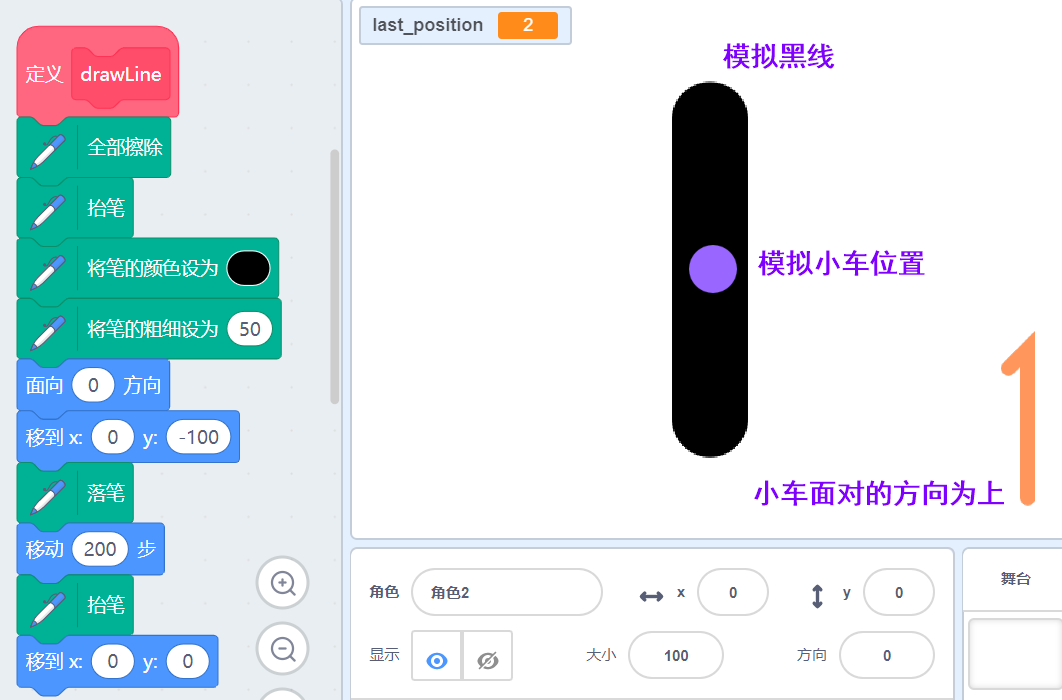
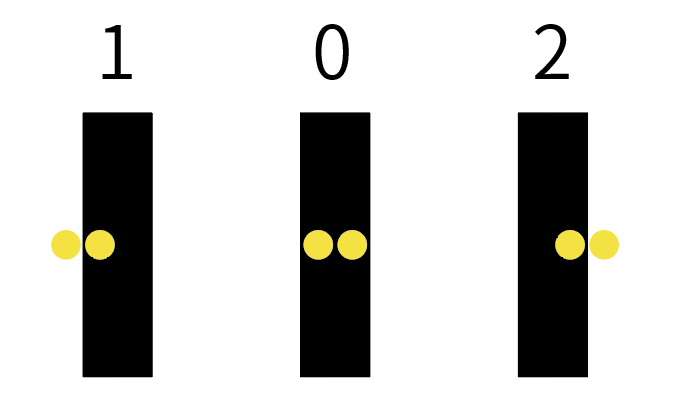
- 我们用一个命名为last_position的变量来存当前小车的位置,具体是根据2个红外探头检测黑线的情况来定
- 程序比较长,可以下载这个程序源文件,说明都卸载程序中了
巡线智械
建议先通过上一部分了解巡线的原理,在这一部分结合实际硬件时会更轻松
案例实现
在舞台编程中了解巡线原理的程序中,我们对小车的位置在舞台上进行了标注,只是实现了小车位置的获取,真正的巡线还需要增加一环:让小车通过现在的位置不断调整自己的运动方式
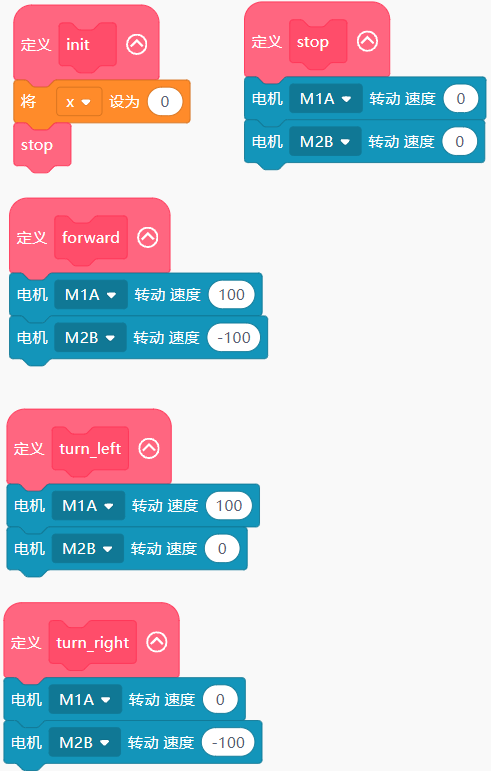
- 既然是运动,那么第一步当然是确定小车的电机速度对应的小车状态,搭建如下程序信息
先点一次init积木块,然后可以分别点小车的直行、左转和右转积木块,测试小车是否按照正确的方式行走
- 其他的实现没有太大变化,请直接下载程序打开参考