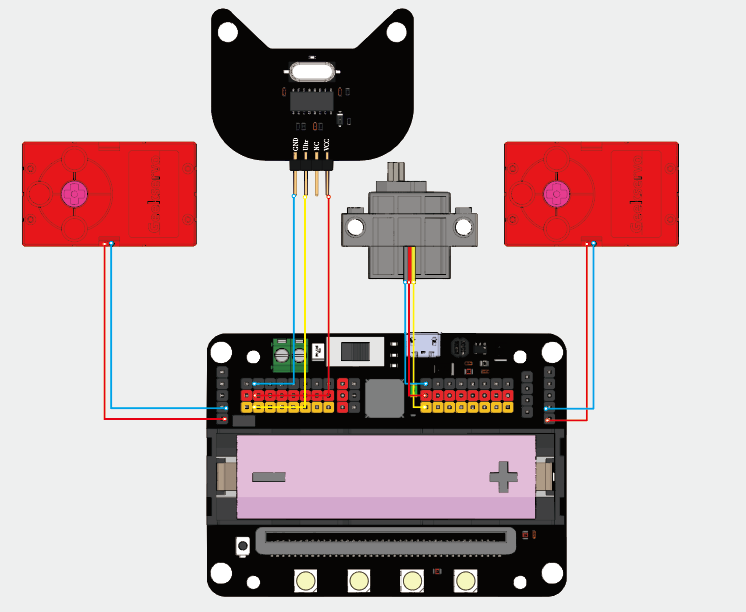
11-避障智械本页总览11-避障智械智能避障小车,搭载了超声波传感器。左右摇头探测,在探测到前方有障碍的时候,小车会停止然后改变前进的方向,从而成功的避开前方障碍。进阶程序更加智能,会先观察前方哪里有障碍物,智能的避开有障碍物的地方,硬件结构搭建图纸避障智械.pdf硬件接线超声波接在p1口左边电机接M1A,右边电机接M2B9g的舵机接在S1程序实现案例1.避障实现初始化电机的转向控制停止并亮起红灯右转前进并亮起绿灯程序开始如果小车前方15处有障碍物,则转向否则往前走案例2.智能避障初始化超声波转向观测小车超声波转向正前方小车超声波转向右方,有障碍物则写入状态小车超声波转向左方,有障碍物则写入状态小车转向 程序开始