09-未来板和Robotbit
Robotbit扩展板不仅将未来板部分IO以杜邦插针方式引出,还板载了电机与舵机驱动。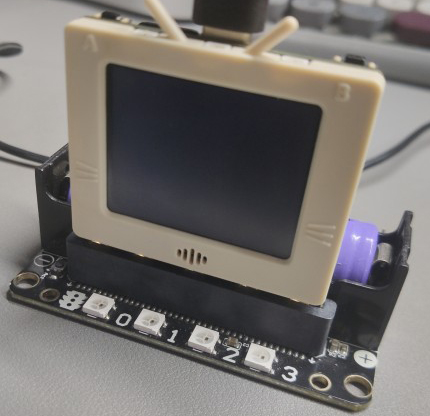
编程积木
| 积木 | 说明 |
|---|---|
 | Robotbit的IIC通讯建立,使用前必须要初始化 |
 | 设置电机的速度(正负决定转动方向) |
 | 停止所有电机 |
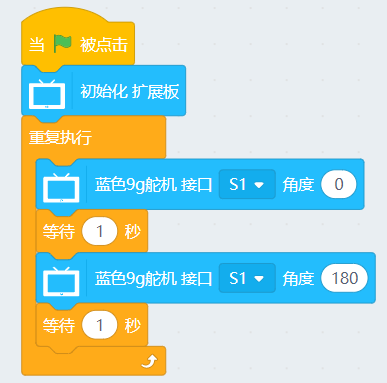
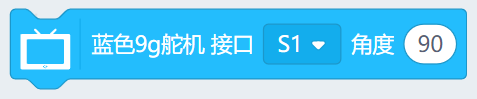 | 设置蓝色9g舵机角度(0-180) |
 | 设置geekservo 9g舵机角度(-45至225) |
 | 设置geekservo 2kg舵机角度(0-360) |
 | 让步进电机按角度转动(正负决定转动方向) |
 |
程序示例
危险
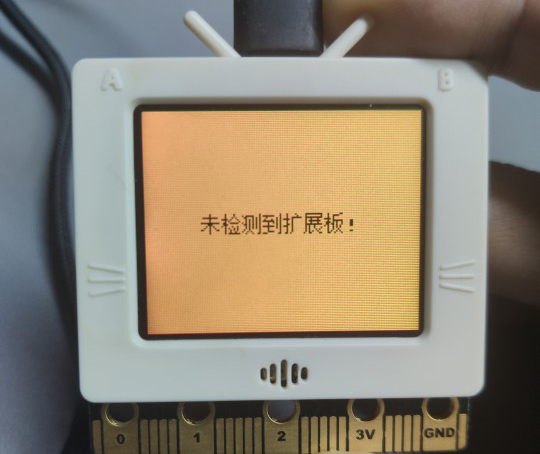
- 当初始化Robotbit时未检测到扩展板,会弹出以下界面警告,并阻塞程序,插上扩展板后程序往下执行
- 由于电机和舵机驱动接口的电源来自于Robotbit上板载的锂电池,所以一定要打开Robotbit的电源开关
📋:驱动电机
接线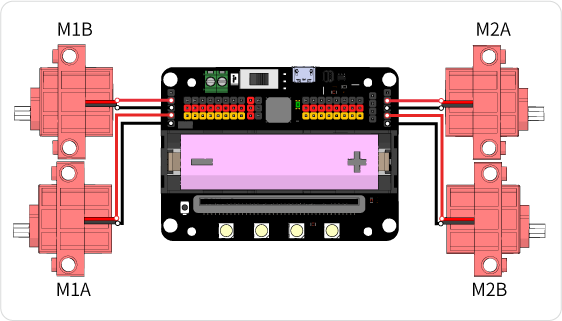
程序
📋:驱动步进电机
接线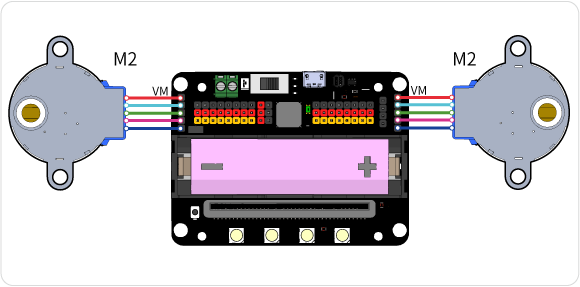
程序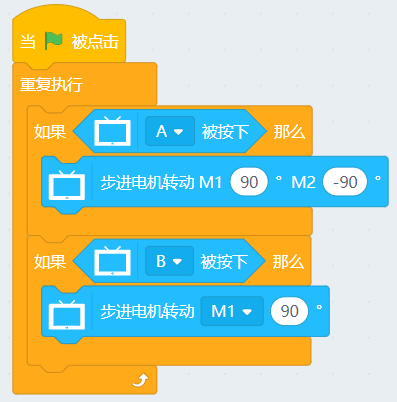
📋:驱动geekservo 9g舵机
接线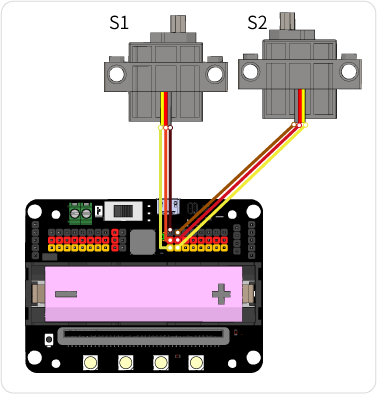
程序
📋:驱动geekservo 2kg舵机
接线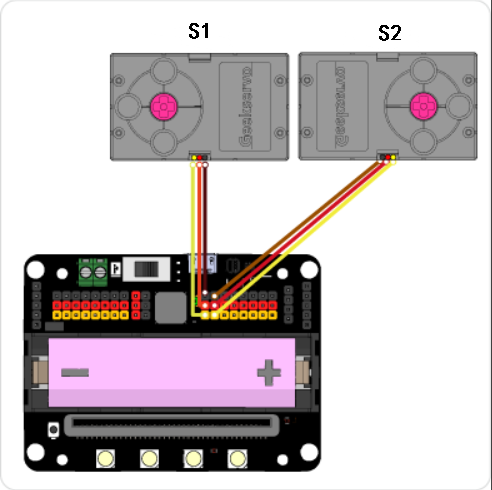
程序
📋:驱动普通蓝色9g舵机
接线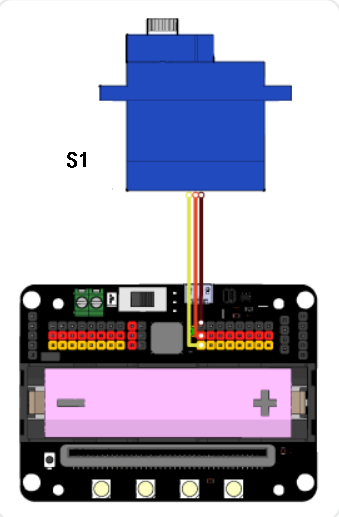
程序