智能AI小喵
项目简介
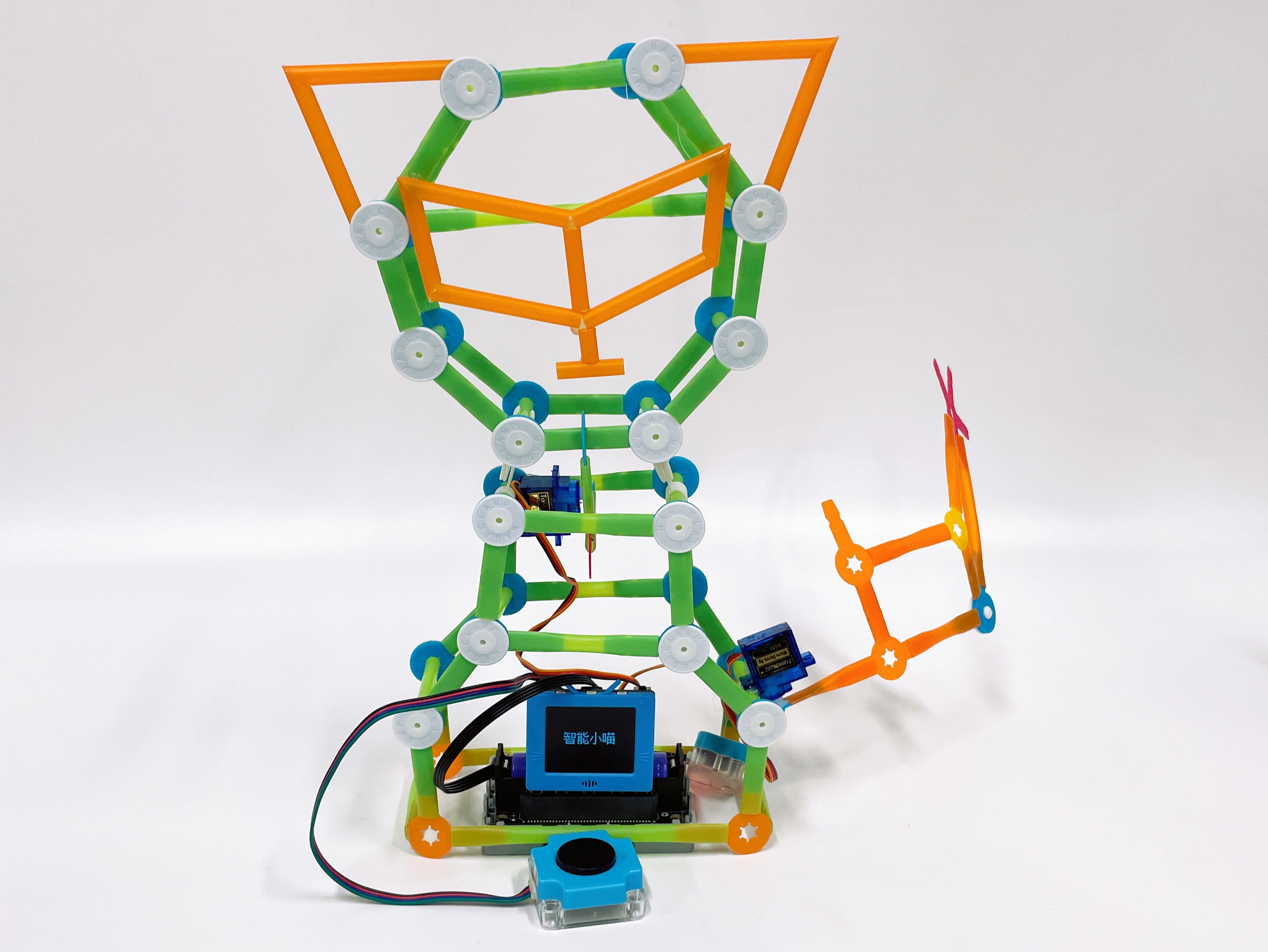
在当今科技飞速发展的时代,动手实践和创造力变得比以往任何时候都更加重要。DIY手工和STEAM教育的结合为孩子们提供了一个独特的平台,让他们探索他们的创造力,同时培养重要的科学、技术、工程、艺术和数学技能。在这个激动人心的项目中,我们将使用吸管和STEAM教育套件来制作一个迷人的小喵形态。通过图形化编程,我们将赋予我们的手工作品生命,使其能够以互动的方式移动和响应。
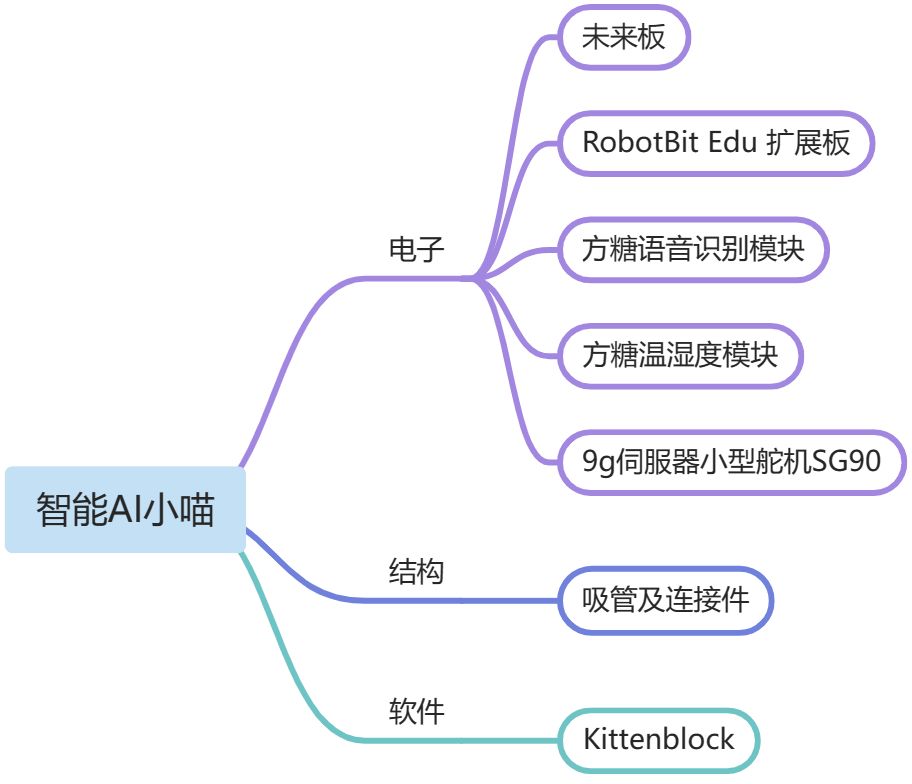
项目清单
 | 未来板 诸多实用的传感器,搭载一块尺寸为160x128的全彩TFT屏幕,自带的wifi与蓝牙功能 |  | 方糖语音识别模块 可离线语音,脱离主板,多路输出控制接口 |
|---|---|---|---|
 | RobotBit Edu 扩展板 自带有电机舵机驱动芯片,能够驱动舵机、电机和步进电机,满足机器人制作需求 |  | 方糖温湿度模块 返回环境温度和湿度环境传感器 |
 | 9g伺服器小型舵机SG90 支持Kittenblock图形化编程控制,用途广泛,体积小,性价比高 |  | 吸管及其他拼接材料 用于拼接小喵形态框架 |
项目框图
实现步骤
步骤概况:
- STEP1:小喵形态结构搭建
- STEP2:硬件安装
- STEP3:软件编程
STEP1:小喵形态结构搭建
将吸管剪出相应的长度,然后使用连接件或者胶水连接起来,可按照 头部->身体->尾巴 的步骤连接组装,
使用不同颜色的吸管和连接环,为小喵形态添加眼睛、鼻子和嘴巴等细节。你还可以添加其他装饰,如胡须或项圈,
小喵形态大家可自由发挥,充分发挥自己的想象力,打造出属于自己的独一无二的智能AI小喵
提示:
- 使用不同长度和颜色的吸管可以创造出更有趣的外观。
- 确保连接环牢固地连接到吸管上。
- 使用热熔胶时要小心,因为它是热的。
- 如果没有热熔胶枪,可以使用强力胶水,但需要更长的干燥时间。
|
 |
|
裁剪出对应长度的吸管用于小喵形态框架 | | --- | --- | | |
|
用于连接吸管的连接件,也可直接使用胶水或者其他连接方式 | | |
|
开始拼装小喵的头部 | |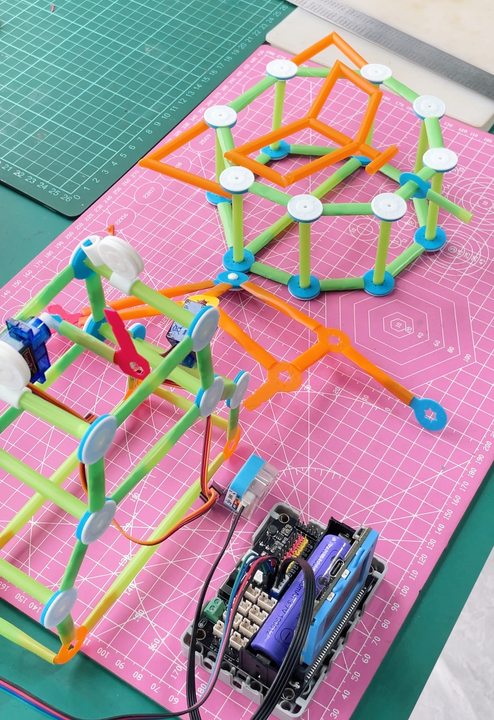 |
|
将小喵的脑袋、身体、尾巴等连接在一起,可发挥自己想象修饰小喵的眼睛,鼻子,胡须以及腿部等 |
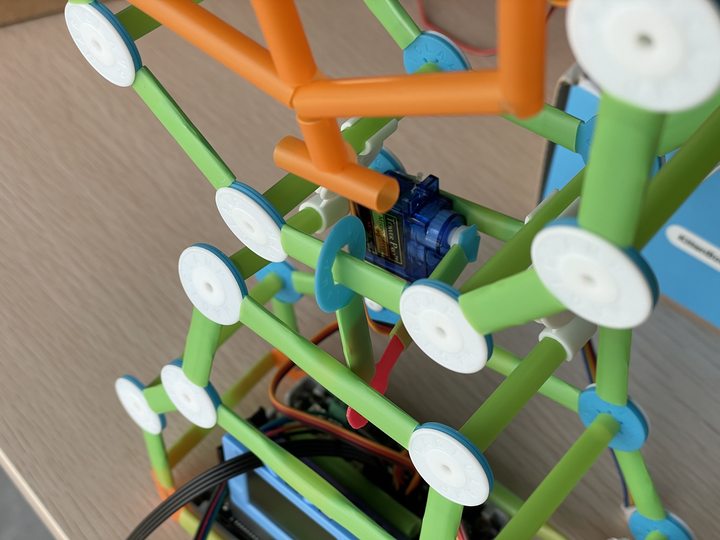
STEP2:硬件的安装
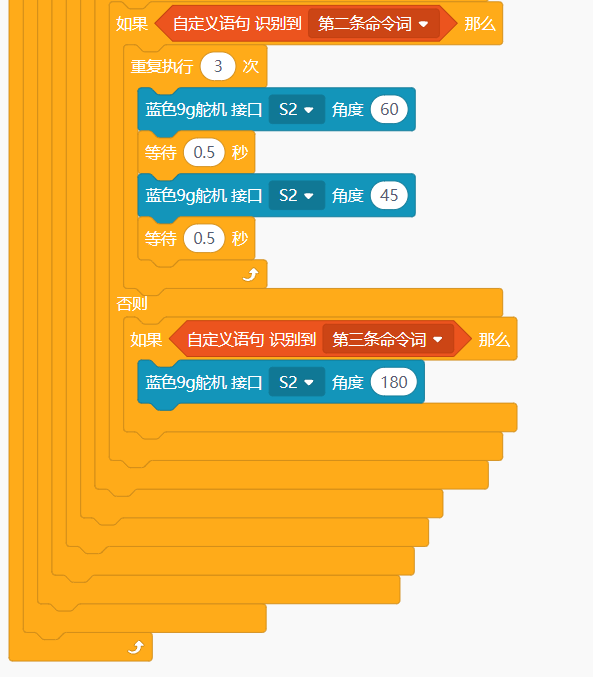
硬件连接主要就是在于两个9g舵机的安装方式,本次小喵互动方式上采用了两种交互方式,一种是点头,一种是是摇尾巴,其他交互方式小伙伴们可自行探索。安装在小喵脑袋和身体之间的舵机通过吸管连杆连接,舵机用热熔胶枪固定,舵机转动特定的角度带动喵头向上运动,如此往复,从而达到智能小喵点头的效果。安装在小喵尾部的舵机也是一样的,舵机旋转特定的角度,从而达到小喵摇尾巴的效果,这里注意舵机安装方向

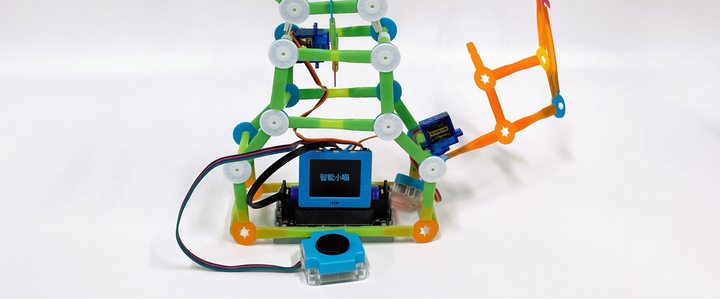
未来板加RobotBit EDU的主控可置于小喵底部,方糖语音识别模块和温湿度模块可放置于其他合适位置,然后将舵机以及各个传感器用线束好,机构部分就大功告成了
STEP3:软件编程
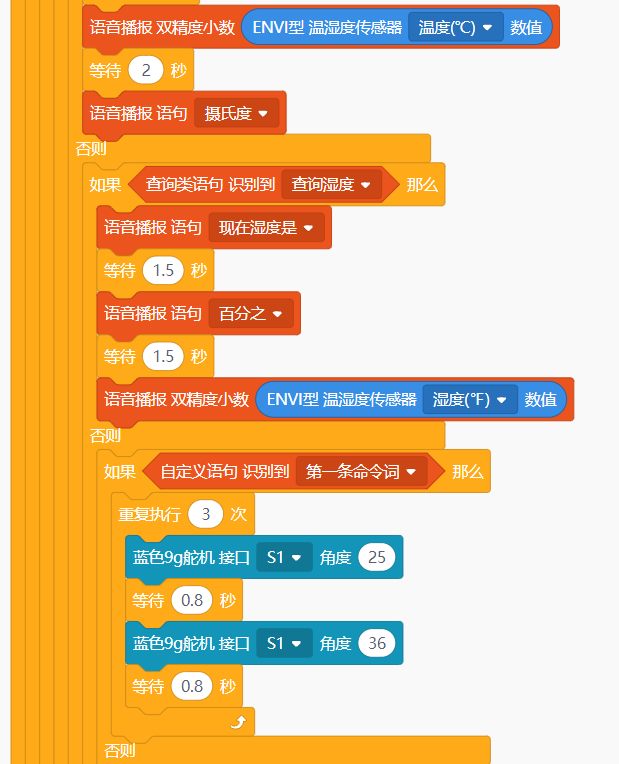
编程部分使用到的是小喵家的Kittenblock图像化编程软件,根据自己所选的模块将积木块拖入主程序中,这里舵机的位置需要根据你安装的位置进行相对旋转角度的调节,调整到合适角度即可。
方糖语音识别模块是可以自定义学习语音命令词的,大家可根据所需自定义语音命令词,具体可参考链接
https://www.yuque.com/kittenbot/hardwares/sugar-asr
温湿度模块数据可通过语音识别模块通过播报形式获得,具体可参考一下程序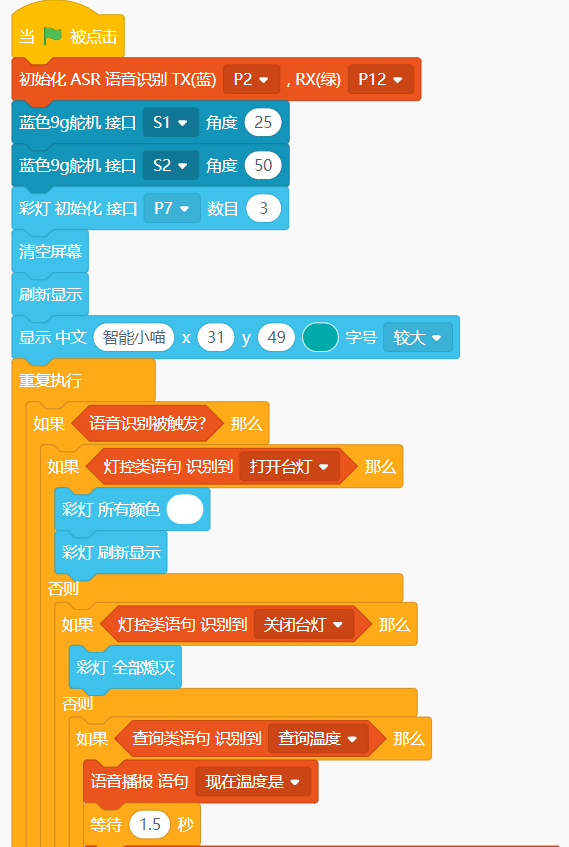
图像化程序编写完成后,点击代码按钮,会将图形化程序转译成纯代码的形式,点击上传按钮下载到未来板主控上
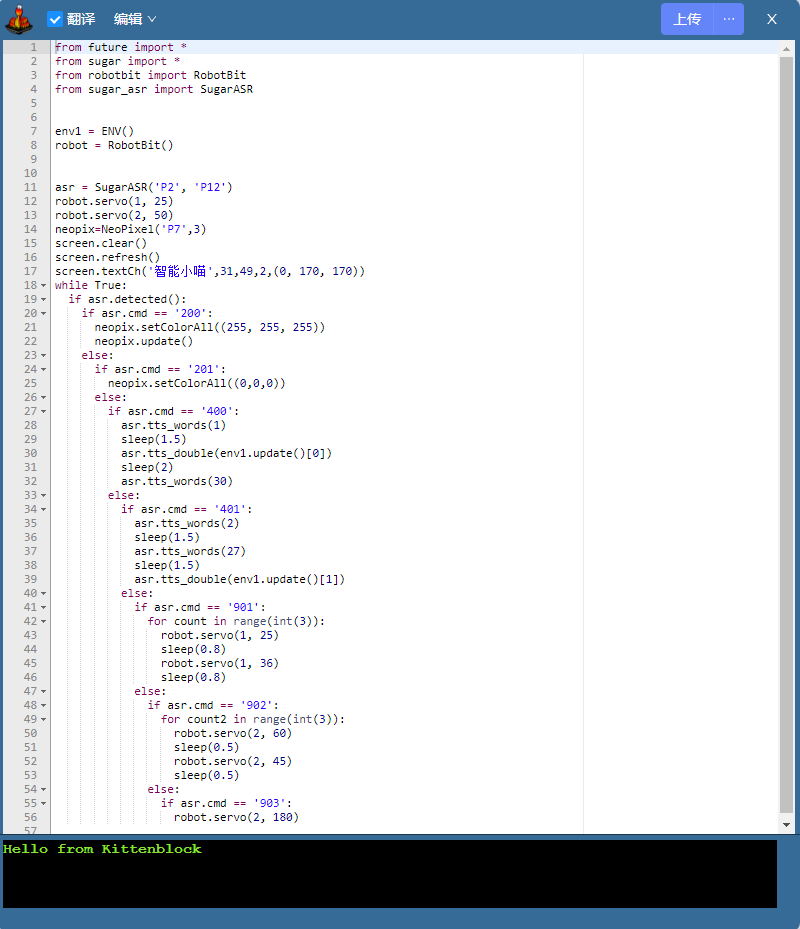
最后通过语音识别模块学习自定义的命令词就可进行语音唤醒和小喵进行互动了